


Summary
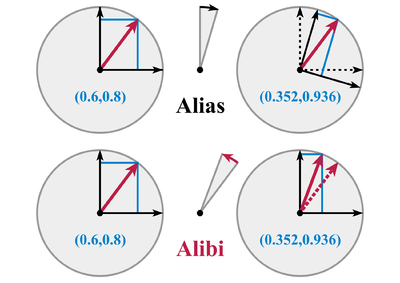
Geometric transformations can be distinguished into two types: active or alibi transformations which change the physical position of a set of points relative to a fixed frame of reference or coordinate system (alibi meaning "being somewhere else at the same time"); and passive or alias transformations which leave points fixed but change the frame of reference or coordinate system relative to which they are described (alias meaning "going under a different name").[1][2] By transformation, mathematicians usually refer to active transformations, while physicists and engineers could mean either.[citation needed]

For instance, active transformations are useful to describe successive positions of a rigid body. On the other hand, passive transformations may be useful in human motion analysis to observe the motion of the tibia relative to the femur, that is, its motion relative to a (local) coordinate system which moves together with the femur, rather than a (global) coordinate system which is fixed to the floor.[2]
In three-dimensional Euclidean space, any proper rigid transformation, whether active or passive, can be represented as a screw displacement, the composition of a translation along an axis and a rotation about that axis.
The terms active transformation and passive transformation were first introduced in 1957 by Valentine Bargmann for describing Lorentz transformations in special relativity.[3]
Example edit
As an example, let the vector , be a vector in the plane. A rotation of the vector through an angle θ in counterclockwise direction is given by the rotation matrix:


Spatial transformations in the Euclidean space R3 edit
In general a spatial transformation may consist of a translation and a linear transformation. In the following, the translation will be omitted, and the linear transformation will be represented by a 3×3 matrix .


Active transformation edit
As an active transformation, transforms the initial vector into a new vector .


If one views as a new basis, then the coordinates of the new vector in the new basis are the same as those of in the original basis. Note that active transformations make sense even as a linear transformation into a different vector space. It makes sense to write the new vector in the unprimed basis (as above) only when the transformation is from the space into itself.



Passive transformation edit
On the other hand, when one views as a passive transformation, the initial vector is left unchanged, while the coordinate system and its basis vectors are transformed in the opposite direction, that is, with the inverse transformation .[4] This gives a new coordinate system XYZ with basis vectors:


The new coordinates of with respect to the new coordinate system XYZ are given by:



From this equation one sees that the new coordinates are given by

As a passive transformation transforms the old coordinates into the new ones.
Note the equivalence between the two kinds of transformations: the coordinates of the new point in the active transformation and the new coordinates of the point in the passive transformation are the same, namely

In abstract vector spaces edit
The distinction between active and passive transformations can be seen mathematically by considering abstract vector spaces.
Fix a finite-dimensional vector space over a field (thought of as or ), and a basis of . This basis provides an isomorphism via the component map .







An active transformation is then an endomorphism on , that is, a linear map from to itself. Taking such a transformation , a vector transforms as . The components of with respect to the basis are defined via the equation . Then, the components of transform as .








A passive transformation is instead an endomorphism on . This is applied to the components: . Provided that is invertible, the new basis is determined by asking that , from which the expression can be derived.





Although the spaces and are isomorphic, they are not canonically isomorphic. Nevertheless a choice of basis allows construction of an isomorphism.


As left- and right-actions edit
Often one restricts to the case where the maps are invertible, so that active transformations are the general linear group of transformations while passive transformations are the group .


The transformations can then be understood as acting on the space of bases for . An active transformation sends the basis . Meanwhile a passive transformation sends the basis .




The inverse in the passive transformation ensures the components transform identically under and . This then gives a sharp distinction between active and passive transformations: active transformations act from the left on bases, while the passive transformations act from the right, due to the inverse.
This observation is made more natural by viewing bases as a choice of isomorphism . The space of bases is equivalently the space of such isomorphisms, denoted . Active transformations, identified with , act on from the left by composition, while passive transformations, identified with acts on from the right by pre-composition.


This turns the space of bases into a left -torsor and a right -torsor.
From a physical perspective, active transformations can be characterized as transformations of physical space, while passive transformations are characterized as redundancies in the description of physical space. This plays an important role in mathematical gauge theory, where gauge transformations are described mathematically by transition maps which act from the right on fibers.
See also edit
References edit
- ^ Crampin, M.; Pirani, F.A.E. (1986). Applicable Differential Geometry. Cambridge University Press. p. 22.
- ^ a b Joseph K. Davidson, Kenneth Henderson Hunt (2004). "§4.4.1 The active interpretation and the active transformation". Robots and screw theory: applications of kinematics and statics to robotics. Oxford University Press. p. 74 ff. ISBN 0-19-856245-4.
- ^ Bargmann, Valentine (1957). "Relativity". Reviews of Modern Physics. 29 (2): 161–174. doi:10.1103/RevModPhys.29.161.
- ^ Amidror, Isaac (2007). "Appendix D: Remark D.12". The theory of the Moiré phenomenon: Aperiodic layers. Springer. p. 346. ISBN 978-1-4020-5457-0.
- Dirk Struik (1953) Lectures on Analytic and Projective Geometry, page 84, Addison-Wesley.
External links edit
- UI ambiguity