


Summary
Bayesian inference (/ˈbeɪziən/ BAY-zee-ən or /ˈbeɪʒən/ BAY-zhən)[1] is a method of statistical inference in which Bayes' theorem is used to update the probability for a hypothesis as more evidence or information becomes available. Fundamentally, Bayesian inference uses prior knowledge, in the form of a prior distribution in order to estimate posterior probabilities. Bayesian inference is an important technique in statistics, and especially in mathematical statistics. Bayesian updating is particularly important in the dynamic analysis of a sequence of data. Bayesian inference has found application in a wide range of activities, including science, engineering, philosophy, medicine, sport, and law. In the philosophy of decision theory, Bayesian inference is closely related to subjective probability, often called "Bayesian probability".
Introduction to Bayes' rule edit
Formal explanation edit
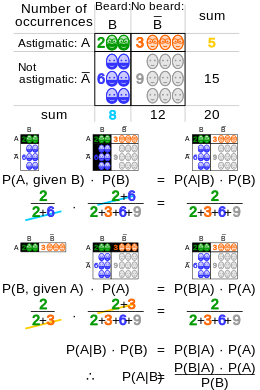
Hypothesis Evidence |
Satisfies hypothesis H |
Violates hypothesis ¬H |
Total | |
|---|---|---|---|---|
| Has evidence E |
P(H|E)·P(E) = P(E|H)·P(H) |
P(¬H|E)·P(E) = P(E|¬H)·P(¬H) |
P(E) | |
| No evidence ¬E |
P(H|¬E)·P(¬E) = P(¬E|H)·P(H) |
P(¬H|¬E)·P(¬E) = P(¬E|¬H)·P(¬H) |
P(¬E) = 1−P(E) | |
| Total | P(H) | P(¬H) = 1−P(H) | 1 | |
Bayesian inference derives the posterior probability as a consequence of two antecedents: a prior probability and a "likelihood function" derived from a statistical model for the observed data. Bayesian inference computes the posterior probability according to Bayes' theorem:

- stands for any hypothesis whose probability may be affected by data (called evidence below). Often there are competing hypotheses, and the task is to determine which is the most probable.
- , the prior probability, is the estimate of the probability of the hypothesis before the data , the current evidence, is observed.
- , the evidence, corresponds to new data that were not used in computing the prior probability.
- , the posterior probability, is the probability of given , i.e., after is observed. This is what we want to know: the probability of a hypothesis given the observed evidence.
- is the probability of observing given and is called the likelihood. As a function of with fixed, it indicates the compatibility of the evidence with the given hypothesis. The likelihood function is a function of the evidence, , while the posterior probability is a function of the hypothesis, .
- is sometimes termed the marginal likelihood or "model evidence". This factor is the same for all possible hypotheses being considered (as is evident from the fact that the hypothesis does not appear anywhere in the symbol, unlike for all the other factors) and hence does not factor into determining the relative probabilities of different hypotheses.
- (Else one has .)








For different values of , only the factors and , both in the numerator, affect the value of – the posterior probability of a hypothesis is proportional to its prior probability (its inherent likeliness) and the newly acquired likelihood (its compatibility with the new observed evidence).
In cases where ("not "), the logical negation of , is a valid likelihood, Bayes' rule can be rewritten as follows:




One quick and easy way to remember the equation would be to use rule of multiplication:

Alternatives to Bayesian updating edit
Bayesian updating is widely used and computationally convenient. However, it is not the only updating rule that might be considered rational.
Ian Hacking noted that traditional "Dutch book" arguments did not specify Bayesian updating: they left open the possibility that non-Bayesian updating rules could avoid Dutch books. Hacking wrote:[2] "And neither the Dutch book argument nor any other in the personalist arsenal of proofs of the probability axioms entails the dynamic assumption. Not one entails Bayesianism. So the personalist requires the dynamic assumption to be Bayesian. It is true that in consistency a personalist could abandon the Bayesian model of learning from experience. Salt could lose its savour."
Indeed, there are non-Bayesian updating rules that also avoid Dutch books (as discussed in the literature on "probability kinematics") following the publication of Richard C. Jeffrey's rule, which applies Bayes' rule to the case where the evidence itself is assigned a probability.[3] The additional hypotheses needed to uniquely require Bayesian updating have been deemed to be substantial, complicated, and unsatisfactory.[4]
Inference over exclusive and exhaustive possibilities edit
If evidence is simultaneously used to update belief over a set of exclusive and exhaustive propositions, Bayesian inference may be thought of as acting on this belief distribution as a whole.
General formulation edit


Suppose a process is generating independent and identically distributed events , but the probability distribution is unknown. Let the event space represent the current state of belief for this process. Each model is represented by event . The conditional probabilities are specified to define the models. is the degree of belief in . Before the first inference step, is a set of initial prior probabilities. These must sum to 1, but are otherwise arbitrary.





Suppose that the process is observed to generate . For each , the prior is updated to the posterior . From Bayes' theorem:[5]





Upon observation of further evidence, this procedure may be repeated.
Multiple observations edit
For a sequence of independent and identically distributed observations , it can be shown by induction that repeated application of the above is equivalent to



Parametric formulation: motivating the formal description edit
By parameterizing the space of models, the belief in all models may be updated in a single step. The distribution of belief over the model space may then be thought of as a distribution of belief over the parameter space. The distributions in this section are expressed as continuous, represented by probability densities, as this is the usual situation. The technique is, however, equally applicable to discrete distributions.
Let the vector span the parameter space. Let the initial prior distribution over be , where is a set of parameters to the prior itself, or hyperparameters. Let be a sequence of independent and identically distributed event observations, where all are distributed as for some . Bayes' theorem is applied to find the posterior distribution over :







Formal description of Bayesian inference edit
Definitions edit
- , a data point in general. This may in fact be a vector of values.
- , the parameter of the data point's distribution, i.e., . This may be a vector of parameters.
- , the hyperparameter of the parameter distribution, i.e., . This may be a vector of hyperparameters.
- is the sample, a set of observed data points, i.e., .
- , a new data point whose distribution is to be predicted.









Bayesian inference edit
- The prior distribution is the distribution of the parameter(s) before any data is observed, i.e. . The prior distribution might not be easily determined; in such a case, one possibility may be to use the Jeffreys prior to obtain a prior distribution before updating it with newer observations.
- The sampling distribution is the distribution of the observed data conditional on its parameters, i.e. . This is also termed the likelihood, especially when viewed as a function of the parameter(s), sometimes written .
- The marginal likelihood (sometimes also termed the evidence) is the distribution of the observed data marginalized over the parameter(s), i.e. It quantifies the agreement between data and expert opinion, in a geometric sense that can be made precise.[6] If the marginal likelihood is 0 then there is no agreement between the data and expert opinion and Bayes' rule cannot be applied.
- The posterior distribution is the distribution of the parameter(s) after taking into account the observed data. This is determined by Bayes' rule, which forms the heart of Bayesian inference: This is expressed in words as "posterior is proportional to likelihood times prior", or sometimes as "posterior = likelihood times prior, over evidence".
- In practice, for almost all complex Bayesian models used in machine learning, the posterior distribution is not obtained in a closed form distribution, mainly because the parameter space for can be very high, or the Bayesian model retains certain hierarchical structure formulated from the observations and parameter . In such situations, we need to resort to approximation techniques.[7]
- General case: Let be the conditional distribution of given and let be the distribution of . The joint distribution is then . The conditional distribution of given is then determined by















Bayesian prediction edit
- The posterior predictive distribution is the distribution of a new data point, marginalized over the posterior:
- The prior predictive distribution is the distribution of a new data point, marginalized over the prior:


Bayesian theory calls for the use of the posterior predictive distribution to do predictive inference, i.e., to predict the distribution of a new, unobserved data point. That is, instead of a fixed point as a prediction, a distribution over possible points is returned. Only this way is the entire posterior distribution of the parameter(s) used. By comparison, prediction in frequentist statistics often involves finding an optimum point estimate of the parameter(s)—e.g., by maximum likelihood or maximum a posteriori estimation (MAP)—and then plugging this estimate into the formula for the distribution of a data point. This has the disadvantage that it does not account for any uncertainty in the value of the parameter, and hence will underestimate the variance of the predictive distribution.
In some instances, frequentist statistics can work around this problem. For example, confidence intervals and prediction intervals in frequentist statistics when constructed from a normal distribution with unknown mean and variance are constructed using a Student's t-distribution. This correctly estimates the variance, due to the facts that (1) the average of normally distributed random variables is also normally distributed, and (2) the predictive distribution of a normally distributed data point with unknown mean and variance, using conjugate or uninformative priors, has a Student's t-distribution. In Bayesian statistics, however, the posterior predictive distribution can always be determined exactly—or at least to an arbitrary level of precision when numerical methods are used.
Both types of predictive distributions have the form of a compound probability distribution (as does the marginal likelihood). In fact, if the prior distribution is a conjugate prior, such that the prior and posterior distributions come from the same family, it can be seen that both prior and posterior predictive distributions also come from the same family of compound distributions. The only difference is that the posterior predictive distribution uses the updated values of the hyperparameters (applying the Bayesian update rules given in the conjugate prior article), while the prior predictive distribution uses the values of the hyperparameters that appear in the prior distribution.
Mathematical properties edit
Interpretation of factor edit
. That is, if the model were true, the evidence would be more likely than is predicted by the current state of belief. The reverse applies for a decrease in belief. If the belief does not change, . That is, the evidence is independent of the model. If the model were true, the evidence would be exactly as likely as predicted by the current state of belief.


Cromwell's rule edit
If then . If and , then . This can be interpreted to mean that hard convictions are insensitive to counter-evidence.




The former follows directly from Bayes' theorem. The latter can be derived by applying the first rule to the event "not " in place of " ", yielding "if , then ", from which the result immediately follows.



Asymptotic behaviour of posterior edit
Consider the behaviour of a belief distribution as it is updated a large number of times with independent and identically distributed trials. For sufficiently nice prior probabilities, the Bernstein-von Mises theorem gives that in the limit of infinite trials, the posterior converges to a Gaussian distribution independent of the initial prior under some conditions firstly outlined and rigorously proven by Joseph L. Doob in 1948, namely if the random variable in consideration has a finite probability space. The more general results were obtained later by the statistician David A. Freedman who published in two seminal research papers in 1963 [13] and 1965 [14] when and under what circumstances the asymptotic behaviour of posterior is guaranteed. His 1963 paper treats, like Doob (1949), the finite case and comes to a satisfactory conclusion. However, if the random variable has an infinite but countable probability space (i.e., corresponding to a die with infinite many faces) the 1965 paper demonstrates that for a dense subset of priors the Bernstein-von Mises theorem is not applicable. In this case there is almost surely no asymptotic convergence. Later in the 1980s and 1990s Freedman and Persi Diaconis continued to work on the case of infinite countable probability spaces.[15] To summarise, there may be insufficient trials to suppress the effects of the initial choice, and especially for large (but finite) systems the convergence might be very slow.
Conjugate priors edit
In parameterized form, the prior distribution is often assumed to come from a family of distributions called conjugate priors. The usefulness of a conjugate prior is that the corresponding posterior distribution will be in the same family, and the calculation may be expressed in closed form.
Estimates of parameters and predictions edit
It is often desired to use a posterior distribution to estimate a parameter or variable. Several methods of Bayesian estimation select measurements of central tendency from the posterior distribution.
For one-dimensional problems, a unique median exists for practical continuous problems. The posterior median is attractive as a robust estimator.[16]
If there exists a finite mean for the posterior distribution, then the posterior mean is a method of estimation.[17]
![{\displaystyle {\tilde {\theta }}=\operatorname {E} [\theta ]=\int \theta \,p(\theta \mid \mathbf {X} ,\alpha )\,d\theta }](https://wikimedia.org/api/rest_v1/media/math/render/svg/fe77d50024b7504dd853e6cee501d293653c546b)
Taking a value with the greatest probability defines maximum a posteriori (MAP) estimates:[18]

There are examples where no maximum is attained, in which case the set of MAP estimates is empty.
There are other methods of estimation that minimize the posterior risk (expected-posterior loss) with respect to a loss function, and these are of interest to statistical decision theory using the sampling distribution ("frequentist statistics").[19]
The posterior predictive distribution of a new observation (that is independent of previous observations) is determined by[20]

Examples edit
Probability of a hypothesis edit
Bowl Cookie |
#1 H1 |
#2 H2 |
Total | |
|---|---|---|---|---|
| Plain, E | 30 | 20 | 50 | |
| Choc, ¬E | 10 | 20 | 30 | |
| Total | 40 | 40 | 80 | |
| P(H1|E) = 30 / 50 = 0.6 | ||||
Suppose there are two full bowls of cookies. Bowl #1 has 10 chocolate chip and 30 plain cookies, while bowl #2 has 20 of each. Our friend Fred picks a bowl at random, and then picks a cookie at random. We may assume there is no reason to believe Fred treats one bowl differently from another, likewise for the cookies. The cookie turns out to be a plain one. How probable is it that Fred picked it out of bowl #1?
Intuitively, it seems clear that the answer should be more than a half, since there are more plain cookies in bowl #1. The precise answer is given by Bayes' theorem. Let correspond to bowl #1, and to bowl #2. It is given that the bowls are identical from Fred's point of view, thus , and the two must add up to 1, so both are equal to 0.5. The event is the observation of a plain cookie. From the contents of the bowls, we know that and Bayes' formula then yields






Before we observed the cookie, the probability we assigned for Fred having chosen bowl #1 was the prior probability, , which was 0.5. After observing the cookie, we must revise the probability to , which is 0.6.


Making a prediction edit

An archaeologist is working at a site thought to be from the medieval period, between the 11th century to the 16th century. However, it is uncertain exactly when in this period the site was inhabited. Fragments of pottery are found, some of which are glazed and some of which are decorated. It is expected that if the site were inhabited during the early medieval period, then 1% of the pottery would be glazed and 50% of its area decorated, whereas if it had been inhabited in the late medieval period then 81% would be glazed and 5% of its area decorated. How confident can the archaeologist be in the date of inhabitation as fragments are unearthed?
The degree of belief in the continuous variable (century) is to be calculated, with the discrete set of events as evidence. Assuming linear variation of glaze and decoration with time, and that these variables are independent,






Assume a uniform prior of , and that trials are independent and identically distributed. When a new fragment of type is discovered, Bayes' theorem is applied to update the degree of belief for each :




A computer simulation of the changing belief as 50 fragments are unearthed is shown on the graph. In the simulation, the site was inhabited around 1420, or . By calculating the area under the relevant portion of the graph for 50 trials, the archaeologist can say that there is practically no chance the site was inhabited in the 11th and 12th centuries, about 1% chance that it was inhabited during the 13th century, 63% chance during the 14th century and 36% during the 15th century. The Bernstein-von Mises theorem asserts here the asymptotic convergence to the "true" distribution because the probability space corresponding to the discrete set of events is finite (see above section on asymptotic behaviour of the posterior).

In frequentist statistics and decision theory edit
A decision-theoretic justification of the use of Bayesian inference was given by Abraham Wald, who proved that every unique Bayesian procedure is admissible. Conversely, every admissible statistical procedure is either a Bayesian procedure or a limit of Bayesian procedures.[21]
Wald characterized admissible procedures as Bayesian procedures (and limits of Bayesian procedures), making the Bayesian formalism a central technique in such areas of frequentist inference as parameter estimation, hypothesis testing, and computing confidence intervals.[22][23][24] For example:
- "Under some conditions, all admissible procedures are either Bayes procedures or limits of Bayes procedures (in various senses). These remarkable results, at least in their original form, are due essentially to Wald. They are useful because the property of being Bayes is easier to analyze than admissibility."[21]
- "In decision theory, a quite general method for proving admissibility consists in exhibiting a procedure as a unique Bayes solution."[25]
- "In the first chapters of this work, prior distributions with finite support and the corresponding Bayes procedures were used to establish some of the main theorems relating to the comparison of experiments. Bayes procedures with respect to more general prior distributions have played a very important role in the development of statistics, including its asymptotic theory." "There are many problems where a glance at posterior distributions, for suitable priors, yields immediately interesting information. Also, this technique can hardly be avoided in sequential analysis."[26]
- "A useful fact is that any Bayes decision rule obtained by taking a proper prior over the whole parameter space must be admissible"[27]
- "An important area of investigation in the development of admissibility ideas has been that of conventional sampling-theory procedures, and many interesting results have been obtained."[28]
Model selection edit
Bayesian methodology also plays a role in model selection where the aim is to select one model from a set of competing models that represents most closely the underlying process that generated the observed data. In Bayesian model comparison, the model with the highest posterior probability given the data is selected. The posterior probability of a model depends on the evidence, or marginal likelihood, which reflects the probability that the data is generated by the model, and on the prior belief of the model. When two competing models are a priori considered to be equiprobable, the ratio of their posterior probabilities corresponds to the Bayes factor. Since Bayesian model comparison is aimed on selecting the model with the highest posterior probability, this methodology is also referred to as the maximum a posteriori (MAP) selection rule [29] or the MAP probability rule.[30]
Probabilistic programming edit
While conceptually simple, Bayesian methods can be mathematically and numerically challenging. Probabilistic programming languages (PPLs) implement functions to easily build Bayesian models together with efficient automatic inference methods. This helps separate the model building from the inference, allowing practitioners to focus on their specific problems and leaving PPLs to handle the computational details for them.[31][32][33]
Applications edit
Statistical data analysis edit
See the separate Wikipedia entry on Bayesian statistics, specifically the statistical modeling section in that page.
Computer applications edit
Bayesian inference has applications in artificial intelligence and expert systems. Bayesian inference techniques have been a fundamental part of computerized pattern recognition techniques since the late 1950s.[34] There is also an ever-growing connection between Bayesian methods and simulation-based Monte Carlo techniques since complex models cannot be processed in closed form by a Bayesian analysis, while a graphical model structure may allow for efficient simulation algorithms like the Gibbs sampling and other Metropolis–Hastings algorithm schemes.[35] Recently[when?] Bayesian inference has gained popularity among the phylogenetics community for these reasons; a number of applications allow many demographic and evolutionary parameters to be estimated simultaneously.
As applied to statistical classification, Bayesian inference has been used to develop algorithms for identifying e-mail spam. Applications which make use of Bayesian inference for spam filtering include CRM114, DSPAM, Bogofilter, SpamAssassin, SpamBayes, Mozilla, XEAMS, and others. Spam classification is treated in more detail in the article on the naïve Bayes classifier.
Solomonoff's Inductive inference is the theory of prediction based on observations; for example, predicting the next symbol based upon a given series of symbols. The only assumption is that the environment follows some unknown but computable probability distribution. It is a formal inductive framework that combines two well-studied principles of inductive inference: Bayesian statistics and Occam's Razor.[36][unreliable source?] Solomonoff's universal prior probability of any prefix p of a computable sequence x is the sum of the probabilities of all programs (for a universal computer) that compute something starting with p. Given some p and any computable but unknown probability distribution from which x is sampled, the universal prior and Bayes' theorem can be used to predict the yet unseen parts of x in optimal fashion.[37][38]
Bioinformatics and healthcare applications edit
Bayesian inference has been applied in different Bioinformatics applications, including differential gene expression analysis.[39] Bayesian inference is also used in a general cancer risk model, called CIRI (Continuous Individualized Risk Index), where serial measurements are incorporated to update a Bayesian model which is primarily built from prior knowledge.[40][41]
In the courtroom edit
Bayesian inference can be used by jurors to coherently accumulate the evidence for and against a defendant, and to see whether, in totality, it meets their personal threshold for "beyond a reasonable doubt".[42][43][44] Bayes' theorem is applied successively to all evidence presented, with the posterior from one stage becoming the prior for the next. The benefit of a Bayesian approach is that it gives the juror an unbiased, rational mechanism for combining evidence. It may be appropriate to explain Bayes' theorem to jurors in odds form, as betting odds are more widely understood than probabilities. Alternatively, a logarithmic approach, replacing multiplication with addition, might be easier for a jury to handle.

If the existence of the crime is not in doubt, only the identity of the culprit, it has been suggested that the prior should be uniform over the qualifying population.[45] For example, if 1,000 people could have committed the crime, the prior probability of guilt would be 1/1000.
The use of Bayes' theorem by jurors is controversial. In the United Kingdom, a defence expert witness explained Bayes' theorem to the jury in R v Adams. The jury convicted, but the case went to appeal on the basis that no means of accumulating evidence had been provided for jurors who did not wish to use Bayes' theorem. The Court of Appeal upheld the conviction, but it also gave the opinion that "To introduce Bayes' Theorem, or any similar method, into a criminal trial plunges the jury into inappropriate and unnecessary realms of theory and complexity, deflecting them from their proper task."
Gardner-Medwin[46] argues that the criterion on which a verdict in a criminal trial should be based is not the probability of guilt, but rather the probability of the evidence, given that the defendant is innocent (akin to a frequentist p-value). He argues that if the posterior probability of guilt is to be computed by Bayes' theorem, the prior probability of guilt must be known. This will depend on the incidence of the crime, which is an unusual piece of evidence to consider in a criminal trial. Consider the following three propositions:
- A – the known facts and testimony could have arisen if the defendant is guilty.
- B – the known facts and testimony could have arisen if the defendant is innocent.
- C – the defendant is guilty.
Gardner-Medwin argues that the jury should believe both A and not-B in order to convict. A and not-B implies the truth of C, but the reverse is not true. It is possible that B and C are both true, but in this case he argues that a jury should acquit, even though they know that they will be letting some guilty people go free. See also Lindley's paradox.
Bayesian epistemology edit
Bayesian epistemology is a movement that advocates for Bayesian inference as a means of justifying the rules of inductive logic.
Karl Popper and David Miller have rejected the idea of Bayesian rationalism, i.e. using Bayes rule to make epistemological inferences:[47] It is prone to the same vicious circle as any other justificationist epistemology, because it presupposes what it attempts to justify. According to this view, a rational interpretation of Bayesian inference would see it merely as a probabilistic version of falsification, rejecting the belief, commonly held by Bayesians, that high likelihood achieved by a series of Bayesian updates would prove the hypothesis beyond any reasonable doubt, or even with likelihood greater than 0.
Other edit
- The scientific method is sometimes interpreted as an application of Bayesian inference. In this view, Bayes' rule guides (or should guide) the updating of probabilities about hypotheses conditional on new observations or experiments.[48] The Bayesian inference has also been applied to treat stochastic scheduling problems with incomplete information by Cai et al. (2009).[49]
- Bayesian search theory is used to search for lost objects.
- Bayesian inference in phylogeny
- Bayesian tool for methylation analysis
- Bayesian approaches to brain function investigate the brain as a Bayesian mechanism.
- Bayesian inference in ecological studies[50][51]
- Bayesian inference is used to estimate parameters in stochastic chemical kinetic models[52]
- Bayesian inference in econophysics for currency or stock market prediction[53][54]
- Bayesian inference in marketing
- Bayesian inference in motor learning
- Bayesian inference is used in probabilistic numerics to solve numerical problems
Bayes and Bayesian inference edit
The problem considered by Bayes in Proposition 9 of his essay, "An Essay towards solving a Problem in the Doctrine of Chances", is the posterior distribution for the parameter a (the success rate) of the binomial distribution.[citation needed]
History edit
The term Bayesian refers to Thomas Bayes (1701–1761), who proved that probabilistic limits could be placed on an unknown event.[citation needed] However, it was Pierre-Simon Laplace (1749–1827) who introduced (as Principle VI) what is now called Bayes' theorem and used it to address problems in celestial mechanics, medical statistics, reliability, and jurisprudence.[55] Early Bayesian inference, which used uniform priors following Laplace's principle of insufficient reason, was called "inverse probability" (because it infers backwards from observations to parameters, or from effects to causes[56]). After the 1920s, "inverse probability" was largely supplanted by a collection of methods that came to be called frequentist statistics.[56]
In the 20th century, the ideas of Laplace were further developed in two different directions, giving rise to objective and subjective currents in Bayesian practice. In the objective or "non-informative" current, the statistical analysis depends on only the model assumed, the data analyzed,[57] and the method assigning the prior, which differs from one objective Bayesian practitioner to another. In the subjective or "informative" current, the specification of the prior depends on the belief (that is, propositions on which the analysis is prepared to act), which can summarize information from experts, previous studies, etc.
In the 1980s, there was a dramatic growth in research and applications of Bayesian methods, mostly attributed to the discovery of Markov chain Monte Carlo methods, which removed many of the computational problems, and an increasing interest in nonstandard, complex applications.[58] Despite growth of Bayesian research, most undergraduate teaching is still based on frequentist statistics.[59] Nonetheless, Bayesian methods are widely accepted and used, such as for example in the field of machine learning.[60]
See also edit
References edit
Citations edit
- ^ "Bayesian". Merriam-Webster.com Dictionary.
- ^ Hacking, Ian (December 1967). "Slightly More Realistic Personal Probability". Philosophy of Science. 34 (4): 316. doi:10.1086/288169. S2CID 14344339.
- ^ "Bayes' Theorem (Stanford Encyclopedia of Philosophy)". Plato.stanford.edu. Retrieved 2014-01-05.
- ^ van Fraassen, B. (1989) Laws and Symmetry, Oxford University Press. ISBN 0-19-824860-1.
- ^ Gelman, Andrew; Carlin, John B.; Stern, Hal S.; Dunson, David B.; Vehtari, Aki; Rubin, Donald B. (2013). Bayesian Data Analysis, Third Edition. Chapman and Hall/CRC. ISBN 978-1-4398-4095-5.
- ^ de Carvalho, Miguel; Page, Garritt; Barney, Bradley (2019). "On the geometry of Bayesian inference" (PDF). Bayesian Analysis. 14 (4): 1013‒1036. doi:10.1214/18-BA1112. S2CID 88521802.
- ^ Lee, Se Yoon (2021). "Gibbs sampler and coordinate ascent variational inference: A set-theoretical review". Communications in Statistics – Theory and Methods. 51 (6): 1549–1568. arXiv:2008.01006. doi:10.1080/03610926.2021.1921214. S2CID 220935477.
- ^ Kolmogorov, A.N. (1933) [1956]. Foundations of the Theory of Probability. Chelsea Publishing Company.
- ^ Tjur, Tue (1980). Probability based on Radon measures. Internet Archive. Chichester [Eng.] ; New York : Wiley. ISBN 978-0-471-27824-5.
- ^ Taraldsen, Gunnar (2024). "Two annoying problems and their solution: Is Bayesian inference well defined? What about improper priors?". RG. doi:10.13140/RG.2.2.26246.38726.
- ^ Taraldsen, Gunnar; Tufto, Jarle; Lindqvist, Bo H. (2021-07-24). "Improper priors and improper posteriors". Scandinavian Journal of Statistics. 49 (3): 969–991. doi:10.1111/sjos.12550. hdl:11250/2984409. ISSN 0303-6898. S2CID 237736986.
- ^ Robert, Christian P.; Casella, George (2004). Monte Carlo Statistical Methods. Springer. ISBN 978-1475741452. OCLC 1159112760.
- ^ Freedman, DA (1963). "On the asymptotic behavior of Bayes' estimates in the discrete case". The Annals of Mathematical Statistics. 34 (4): 1386–1403. doi:10.1214/aoms/1177703871. JSTOR 2238346.
- ^ Freedman, DA (1965). "On the asymptotic behavior of Bayes estimates in the discrete case II". The Annals of Mathematical Statistics. 36 (2): 454–456. doi:10.1214/aoms/1177700155. JSTOR 2238150.
- ^ Robins, James; Wasserman, Larry (2000). "Conditioning, likelihood, and coherence: A review of some foundational concepts". Journal of the American Statistical Association. 95 (452): 1340–1346. doi:10.1080/01621459.2000.10474344. S2CID 120767108.
- ^ Sen, Pranab K.; Keating, J. P.; Mason, R. L. (1993). Pitman's measure of closeness: A comparison of statistical estimators. Philadelphia: SIAM.
- ^ Choudhuri, Nidhan; Ghosal, Subhashis; Roy, Anindya (2005-01-01). "Bayesian Methods for Function Estimation". Handbook of Statistics. Bayesian Thinking. Vol. 25. pp. 373–414. CiteSeerX 10.1.1.324.3052. doi:10.1016/s0169-7161(05)25013-7. ISBN 9780444515391.
- ^ "Maximum A Posteriori (MAP) Estimation". www.probabilitycourse.com. Retrieved 2017-06-02.
- ^ Yu, Angela. "Introduction to Bayesian Decision Theory" (PDF). cogsci.ucsd.edu/. Archived from the original (PDF) on 2013-02-28.
- ^ Hitchcock, David. "Posterior Predictive Distribution Stat Slide" (PDF). stat.sc.edu.
- ^ a b Bickel & Doksum (2001, p. 32)
- ^ Kiefer, J.; Schwartz R. (1965). "Admissible Bayes Character of T2-, R2-, and Other Fully Invariant Tests for Multivariate Normal Problems". Annals of Mathematical Statistics. 36 (3): 747–770. doi:10.1214/aoms/1177700051.
- ^ Schwartz, R. (1969). "Invariant Proper Bayes Tests for Exponential Families". Annals of Mathematical Statistics. 40: 270–283. doi:10.1214/aoms/1177697822.
- ^ Hwang, J. T. & Casella, George (1982). "Minimax Confidence Sets for the Mean of a Multivariate Normal Distribution" (PDF). Annals of Statistics. 10 (3): 868–881. doi:10.1214/aos/1176345877.
- ^ Lehmann, Erich (1986). Testing Statistical Hypotheses (Second ed.). (see p. 309 of Chapter 6.7 "Admissibility", and pp. 17–18 of Chapter 1.8 "Complete Classes"
- ^ Le Cam, Lucien (1986). Asymptotic Methods in Statistical Decision Theory. Springer-Verlag. ISBN 978-0-387-96307-5. (From "Chapter 12 Posterior Distributions and Bayes Solutions", p. 324)
- ^ Cox, D. R.; Hinkley, D.V. (1974). Theoretical Statistics. Chapman and Hall. p. 432. ISBN 978-0-04-121537-3.
- ^ Cox, D. R.; Hinkley, D.V. (1974). Theoretical Statistics. Chapman and Hall. p. 433. ISBN 978-0-04-121537-3.)
- ^ Stoica, P.; Selen, Y. (2004). "A review of information criterion rules". IEEE Signal Processing Magazine. 21 (4): 36–47. doi:10.1109/MSP.2004.1311138. S2CID 17338979.
- ^ Fatermans, J.; Van Aert, S.; den Dekker, A.J. (2019). "The maximum a posteriori probability rule for atom column detection from HAADF STEM images". Ultramicroscopy. 201: 81–91. arXiv:1902.05809. doi:10.1016/j.ultramic.2019.02.003. PMID 30991277. S2CID 104419861.
- ^ Bessiere, P., Mazer, E., Ahuactzin, J. M., & Mekhnacha, K. (2013). Bayesian Programming (1 edition) Chapman and Hall/CRC.
- ^ Daniel Roy (2015). "Probabilistic Programming". probabilistic-programming.org. Archived from the original on 2016-01-10. Retrieved 2020-01-02.
- ^ Ghahramani, Z (2015). "Probabilistic machine learning and artificial intelligence". Nature. 521 (7553): 452–459. Bibcode:2015Natur.521..452G. doi:10.1038/nature14541. PMID 26017444. S2CID 216356.
- ^ Fienberg, Stephen E. (2006-03-01). "When did Bayesian inference become "Bayesian"?". Bayesian Analysis. 1 (1). doi:10.1214/06-BA101.
- ^ Jim Albert (2009). Bayesian Computation with R, Second edition. New York, Dordrecht, etc.: Springer. ISBN 978-0-387-92297-3.
- ^ Rathmanner, Samuel; Hutter, Marcus; Ormerod, Thomas C (2011). "A Philosophical Treatise of Universal Induction". Entropy. 13 (6): 1076–1136. arXiv:1105.5721. Bibcode:2011Entrp..13.1076R. doi:10.3390/e13061076. S2CID 2499910.
- ^ Hutter, Marcus; He, Yang-Hui; Ormerod, Thomas C (2007). "On Universal Prediction and Bayesian Confirmation". Theoretical Computer Science. 384 (2007): 33–48. arXiv:0709.1516. Bibcode:2007arXiv0709.1516H. doi:10.1016/j.tcs.2007.05.016. S2CID 1500830.
- ^ Gács, Peter; Vitányi, Paul M. B. (2 December 2010). "Raymond J. Solomonoff 1926-2009". CiteSeerX 10.1.1.186.8268.
- ^ Robinson, Mark D & McCarthy, Davis J & Smyth, Gordon K edgeR: a Bioconductor package for differential expression analysis of digital gene expression data, Bioinformatics.
- ^ "CIRI". ciri.stanford.edu. Retrieved 2019-08-11.
- ^ Kurtz, David M.; Esfahani, Mohammad S.; Scherer, Florian; Soo, Joanne; Jin, Michael C.; Liu, Chih Long; Newman, Aaron M.; Dührsen, Ulrich; Hüttmann, Andreas (2019-07-25). "Dynamic Risk Profiling Using Serial Tumor Biomarkers for Personalized Outcome Prediction". Cell. 178 (3): 699–713.e19. doi:10.1016/j.cell.2019.06.011. ISSN 1097-4172. PMC 7380118. PMID 31280963.
- ^ Dawid, A. P. and Mortera, J. (1996) "Coherent Analysis of Forensic Identification Evidence". Journal of the Royal Statistical Society, Series B, 58, 425–443.
- ^ Foreman, L. A.; Smith, A. F. M., and Evett, I. W. (1997). "Bayesian analysis of deoxyribonucleic acid profiling data in forensic identification applications (with discussion)". Journal of the Royal Statistical Society, Series A, 160, 429–469.
- ^ Robertson, B. and Vignaux, G. A. (1995) Interpreting Evidence: Evaluating Forensic Science in the Courtroom. John Wiley and Sons. Chichester. ISBN 978-0-471-96026-3.
- ^ Dawid, A. P. (2001) Bayes' Theorem and Weighing Evidence by Juries. Archived 2015-07-01 at the Wayback Machine
- ^ Gardner-Medwin, A. (2005) "What Probability Should the Jury Address?". Significance, 2 (1), March 2005.
- ^ Miller, David (1994). Critical Rationalism. Chicago: Open Court. ISBN 978-0-8126-9197-9.
- ^ Howson & Urbach (2005), Jaynes (2003)
- ^ Cai, X.Q.; Wu, X.Y.; Zhou, X. (2009). "Stochastic scheduling subject to breakdown-repeat breakdowns with incomplete information". Operations Research. 57 (5): 1236–1249. doi:10.1287/opre.1080.0660.
- ^ Ogle, Kiona; Tucker, Colin; Cable, Jessica M. (2014-01-01). "Beyond simple linear mixing models: process-based isotope partitioning of ecological processes". Ecological Applications. 24 (1): 181–195. doi:10.1890/1051-0761-24.1.181. ISSN 1939-5582. PMID 24640543.
- ^ Evaristo, Jaivime; McDonnell, Jeffrey J.; Scholl, Martha A.; Bruijnzeel, L. Adrian; Chun, Kwok P. (2016-01-01). "Insights into plant water uptake from xylem-water isotope measurements in two tropical catchments with contrasting moisture conditions". Hydrological Processes. 30 (18): 3210–3227. Bibcode:2016HyPr...30.3210E. doi:10.1002/hyp.10841. ISSN 1099-1085. S2CID 131588159.
- ^ Gupta, Ankur; Rawlings, James B. (April 2014). "Comparison of Parameter Estimation Methods in Stochastic Chemical Kinetic Models: Examples in Systems Biology". AIChE Journal. 60 (4): 1253–1268. Bibcode:2014AIChE..60.1253G. doi:10.1002/aic.14409. ISSN 0001-1541. PMC 4946376. PMID 27429455.
- ^ Fornalski, K.W. (2016). "The Tadpole Bayesian Model for Detecting Trend Changes in Financial Quotations" (PDF). R&R Journal of Statistics and Mathematical Sciences. 2 (1): 117–122.
- ^ Schütz, N.; Holschneider, M. (2011). "Detection of trend changes in time series using Bayesian inference". Physical Review E. 84 (2): 021120. arXiv:1104.3448. Bibcode:2011PhRvE..84b1120S. doi:10.1103/PhysRevE.84.021120. PMID 21928962. S2CID 11460968.
- ^ Stigler, Stephen M. (1986). "Chapter 3". The History of Statistics. Harvard University Press. ISBN 9780674403406.
- ^ a b Fienberg, Stephen E. (2006). "When did Bayesian Inference Become 'Bayesian'?". Bayesian Analysis. 1 (1): 1–40 [p. 5]. doi:10.1214/06-ba101.
- ^ Bernardo, José-Miguel (2005). "Reference analysis". Handbook of statistics. Vol. 25. pp. 17–90.
- ^ Wolpert, R. L. (2004). "A Conversation with James O. Berger". Statistical Science. 19 (1): 205–218. CiteSeerX 10.1.1.71.6112. doi:10.1214/088342304000000053. MR 2082155. S2CID 120094454.
- ^ Bernardo, José M. (2006). "A Bayesian mathematical statistics primer" (PDF). Icots-7.
- ^ Bishop, C. M. (2007). Pattern Recognition and Machine Learning. New York: Springer. ISBN 978-0387310732.
Sources edit
- Aster, Richard; Borchers, Brian, and Thurber, Clifford (2012). Parameter Estimation and Inverse Problems, Second Edition, Elsevier. ISBN 0123850487, ISBN 978-0123850485
- Bickel, Peter J. & Doksum, Kjell A. (2001). Mathematical Statistics, Volume 1: Basic and Selected Topics (Second (updated printing 2007) ed.). Pearson Prentice–Hall. ISBN 978-0-13-850363-5.
- Box, G. E. P. and Tiao, G. C. (1973). Bayesian Inference in Statistical Analysis, Wiley, ISBN 0-471-57428-7
- Edwards, Ward (1968). "Conservatism in Human Information Processing". In Kleinmuntz, B. (ed.). Formal Representation of Human Judgment. Wiley.
- Edwards, Ward (1982). Daniel Kahneman; Paul Slovic; Amos Tversky (eds.). "Judgment under uncertainty: Heuristics and biases". Science. 185 (4157): 1124–1131. Bibcode:1974Sci...185.1124T. doi:10.1126/science.185.4157.1124. PMID 17835457. S2CID 143452957.
Chapter: Conservatism in Human Information Processing (excerpted)
- Jaynes E. T. (2003) Probability Theory: The Logic of Science, CUP. ISBN 978-0-521-59271-0 (Link to Fragmentary Edition of March 1996).
- Howson, C. & Urbach, P. (2005). Scientific Reasoning: the Bayesian Approach (3rd ed.). Open Court Publishing Company. ISBN 978-0-8126-9578-6.
- Phillips, L. D.; Edwards, Ward (October 2008). "Chapter 6: Conservatism in a Simple Probability Inference Task (Journal of Experimental Psychology (1966) 72: 346-354)". In Jie W. Weiss; David J. Weiss (eds.). A Science of Decision Making:The Legacy of Ward Edwards. Oxford University Press. p. 536. ISBN 978-0-19-532298-9.
Further reading edit
- For a full report on the history of Bayesian statistics and the debates with frequentists approaches, read Vallverdu, Jordi (2016). Bayesians Versus Frequentists A Philosophical Debate on Statistical Reasoning. New York: Springer. ISBN 978-3-662-48638-2.
- Clayton, Aubrey (August 2021). Bernoulli's Fallacy: Statistical Illogic and the Crisis of Modern Science. Columbia University Press. ISBN 978-0-231-55335-3.
Elementary edit
The following books are listed in ascending order of probabilistic sophistication:
- Stone, JV (2013), "Bayes' Rule: A Tutorial Introduction to Bayesian Analysis", Download first chapter here, Sebtel Press, England.
- Dennis V. Lindley (2013). Understanding Uncertainty, Revised Edition (2nd ed.). John Wiley. ISBN 978-1-118-65012-7.
- Colin Howson & Peter Urbach (2005). Scientific Reasoning: The Bayesian Approach (3rd ed.). Open Court Publishing Company. ISBN 978-0-8126-9578-6.
- Berry, Donald A. (1996). Statistics: A Bayesian Perspective. Duxbury. ISBN 978-0-534-23476-8.
- Morris H. DeGroot & Mark J. Schervish (2002). Probability and Statistics (third ed.). Addison-Wesley. ISBN 978-0-201-52488-8.
- Bolstad, William M. (2007) Introduction to Bayesian Statistics: Second Edition, John Wiley ISBN 0-471-27020-2
- Winkler, Robert L (2003). Introduction to Bayesian Inference and Decision (2nd ed.). Probabilistic. ISBN 978-0-9647938-4-2. Updated classic textbook. Bayesian theory clearly presented.
- Lee, Peter M. Bayesian Statistics: An Introduction. Fourth Edition (2012), John Wiley ISBN 978-1-1183-3257-3
- Carlin, Bradley P. & Louis, Thomas A. (2008). Bayesian Methods for Data Analysis, Third Edition. Boca Raton, FL: Chapman and Hall/CRC. ISBN 978-1-58488-697-6.
- Gelman, Andrew; Carlin, John B.; Stern, Hal S.; Dunson, David B.; Vehtari, Aki; Rubin, Donald B. (2013). Bayesian Data Analysis, Third Edition. Chapman and Hall/CRC. ISBN 978-1-4398-4095-5.
Intermediate or advanced edit
- Berger, James O (1985). Statistical Decision Theory and Bayesian Analysis. Springer Series in Statistics (Second ed.). Springer-Verlag. Bibcode:1985sdtb.book.....B. ISBN 978-0-387-96098-2.
- Bernardo, José M.; Smith, Adrian F. M. (1994). Bayesian Theory. Wiley.
- DeGroot, Morris H., Optimal Statistical Decisions. Wiley Classics Library. 2004. (Originally published (1970) by McGraw-Hill.) ISBN 0-471-68029-X.
- Schervish, Mark J. (1995). Theory of statistics. Springer-Verlag. ISBN 978-0-387-94546-0.
- Jaynes, E. T. (1998). Probability Theory: The Logic of Science.
- O'Hagan, A. and Forster, J. (2003). Kendall's Advanced Theory of Statistics, Volume 2B: Bayesian Inference. Arnold, New York. ISBN 0-340-52922-9.
- Robert, Christian P (2007). The Bayesian Choice: From Decision-Theoretic Foundations to Computational Implementation (paperback ed.). Springer. ISBN 978-0-387-71598-8.
- Pearl, Judea. (1988). Probabilistic Reasoning in Intelligent Systems: Networks of Plausible Inference, San Mateo, CA: Morgan Kaufmann.
- Pierre Bessière et al. (2013). "Bayesian Programming". CRC Press. ISBN 9781439880326
- Francisco J. Samaniego (2010). "A Comparison of the Bayesian and Frequentist Approaches to Estimation". Springer. New York, ISBN 978-1-4419-5940-9
External links edit
- "Bayesian approach to statistical problems", Encyclopedia of Mathematics, EMS Press, 2001 [1994]
- Bayesian Statistics from Scholarpedia.
- Introduction to Bayesian probability from Queen Mary University of London
- Mathematical Notes on Bayesian Statistics and Markov Chain Monte Carlo
- Bayesian reading list, categorized and annotated by Tom Griffiths
- A. Hajek and S. Hartmann: Bayesian Epistemology, in: J. Dancy et al. (eds.), A Companion to Epistemology. Oxford: Blackwell 2010, 93–106.
- S. Hartmann and J. Sprenger: Bayesian Epistemology, in: S. Bernecker and D. Pritchard (eds.), Routledge Companion to Epistemology. London: Routledge 2010, 609–620.
- Stanford Encyclopedia of Philosophy: "Inductive Logic"
- Bayesian Confirmation Theory (PDF)
- What is Bayesian Learning?
- Data, Uncertainty and Inference — Informal introduction with many examples, ebook (PDF) freely available at causaScientia