


Summary
In numerical analysis, an n-point Gaussian quadrature rule, named after Carl Friedrich Gauss,[1] is a quadrature rule constructed to yield an exact result for polynomials of degree 2n − 1 or less by a suitable choice of the nodes xi and weights wi for i = 1, ..., n.

The blue curve shows the function whose definite integral on the interval [−1, 1] is to be calculated (the integrand). The trapezoidal rule approximates the function with a linear function that coincides with the integrand at the endpoints of the interval and is represented by an orange dashed line. The approximation is apparently not good, so the error is large (the trapezoidal rule gives an approximation of the integral equal to y(–1) + y(1) = –10, while the correct value is 2⁄3). To obtain a more accurate result, the interval must be partitioned into many subintervals and then the composite trapezoidal rule must be used, which requires much more calculations.
The Gaussian quadrature chooses more suitable points instead, so even a linear function approximates the function better (the black dashed line). As the integrand is the polynomial of degree 3 (y(x) = 7x3 – 8x2 – 3x + 3), the 2-point Gaussian quadrature rule even returns an exact result.
The modern formulation using orthogonal polynomials was developed by Carl Gustav Jacobi in 1826.[2] The most common domain of integration for such a rule is taken as [−1, 1], so the rule is stated as

which is exact for polynomials of degree 2n − 1 or less. This exact rule is known as the Gauss–Legendre quadrature rule. The quadrature rule will only be an accurate approximation to the integral above if f (x) is well-approximated by a polynomial of degree 2n − 1 or less on [−1, 1].
The Gauss–Legendre quadrature rule is not typically used for integrable functions with endpoint singularities. Instead, if the integrand can be written as

where g(x) is well-approximated by a low-degree polynomial, then alternative nodes xi' and weights wi' will usually give more accurate quadrature rules. These are known as Gauss–Jacobi quadrature rules, i.e.,

Common weights include (Chebyshev–Gauss) and . One may also want to integrate over semi-infinite (Gauss–Laguerre quadrature) and infinite intervals (Gauss–Hermite quadrature).


It can be shown (see Press et al., or Stoer and Bulirsch) that the quadrature nodes xi are the roots of a polynomial belonging to a class of orthogonal polynomials (the class orthogonal with respect to a weighted inner-product). This is a key observation for computing Gauss quadrature nodes and weights.
Gauss–Legendre quadrature edit
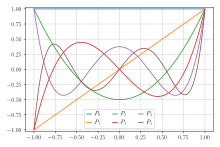
For the simplest integration problem stated above, i.e., f(x) is well-approximated by polynomials on , the associated orthogonal polynomials are Legendre polynomials, denoted by Pn(x). With the n-th polynomial normalized to give Pn(1) = 1, the i-th Gauss node, xi, is the i-th root of Pn and the weights are given by the formula[3]
![{\displaystyle [-1,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/51e3b7f14a6f70e614728c583409a0b9a8b9de01)
![{\displaystyle w_{i}={\frac {2}{\left(1-x_{i}^{2}\right)\left[P'_{n}(x_{i})\right]^{2}}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/92a5533b3b5d42f1c60c3c5e6e5d62c37c2878a3)
Some low-order quadrature rules are tabulated below (over interval [−1, 1], see the section below for other intervals).
| Number of points, n | Points, xi | Weights, wi | ||
|---|---|---|---|---|
| 1 | 0 | 2 | ||
| 2 | ±0.57735... | 1 | ||
| 3 | 0 | 0.888889... | ||
| ±0.774597... | 0.555556... | |||
| 4 | ±0.339981... | 0.652145... | ||
| ±0.861136... | 0.347855... | |||
| 5 | 0 | 0.568889... | ||
| ±0.538469... | 0.478629... | |||
| ±0.90618... | 0.236927... | |||













Change of interval edit
An integral over [a, b] must be changed into an integral over [−1, 1] before applying the Gaussian quadrature rule. This change of interval can be done in the following way:

with

Applying the point Gaussian quadrature rule then results in the following approximation:



Example of two-point Gauss quadrature rule edit
Use the two-point Gauss quadrature rule to approximate the distance in meters covered by a rocket from to as given by


![{\displaystyle x=\int _{8}^{30}{\left(2000\ln \left[{\frac {140000}{140000-2100t}}\right]-9.8t\right){dt}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ecae0be1e93272d4b632f12789948635659cd3f5)
Change the limits so that one can use the weights and abscissae given in Table 1. Also, find the absolute relative true error. The true value is given as 11061.34 m.
Solution
First, changing the limits of integration from to gives
![{\displaystyle \left[8,30\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b786e0d97047572ba1a36ff5ccc72a27b09b8eb2)
![{\displaystyle \left[-1,1\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/79566f857ac1fcd0ef0f62226298a4ed15b796ad)

Next, get the weighting factors and function argument values from Table 1 for the two-point rule,




Now we can use the Gauss quadrature formula
![{\displaystyle {\begin{aligned}11\int _{-1}^{1}{f\left(11x+19\right){dx}}&\approx 11\left[c_{1}f\left(11x_{1}+19\right)+c_{2}f\left(11x_{2}+19\right)\right]\\&=11\left[f\left(11(-0.5773503)+19\right)+f\left(11(0.5773503)+19\right)\right]\\&=11\left[f(12.64915)+f(25.35085)\right]\\&=11\left[(296.8317)+(708.4811)\right]\\&=11058.44\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c1cb61ab73cc8da5361e4b92d7767b1096d61ab1)
![{\displaystyle {\begin{aligned}f(12.64915)&=2000\ln \left[{\frac {140000}{140000-2100(12.64915)}}\right]-9.8(12.64915)\\&=296.8317\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/35daceca417b58a97f96c064305ec13426bb40d8)
![{\displaystyle {\begin{aligned}f(25.35085)&=2000\ln \left[{\frac {140000}{140000-2100(25.35085)}}\right]-9.8(25.35085)\\&=708.4811\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3433f0d527732886cba3d09aa9733423abc8628f)
Given that the true value is 11061.34 m, the absolute relative true error, is


Other forms edit
The integration problem can be expressed in a slightly more general way by introducing a positive weight function ω into the integrand, and allowing an interval other than [−1, 1]. That is, the problem is to calculate

| Interval | ω(x) | Orthogonal polynomials | A & S | For more information, see ... |
|---|---|---|---|---|
| [−1, 1] | 1 | Legendre polynomials | 25.4.29 | § Gauss–Legendre quadrature |
| (−1, 1) | Jacobi polynomials | 25.4.33 (β = 0) | Gauss–Jacobi quadrature | |
| (−1, 1) | Chebyshev polynomials (first kind) | 25.4.38 | Chebyshev–Gauss quadrature | |
| [−1, 1] | Chebyshev polynomials (second kind) | 25.4.40 | Chebyshev–Gauss quadrature | |
| [0, ∞) | Laguerre polynomials | 25.4.45 | Gauss–Laguerre quadrature | |
| [0, ∞) | Generalized Laguerre polynomials | Gauss–Laguerre quadrature | ||
| (−∞, ∞) | Hermite polynomials | 25.4.46 | Gauss–Hermite quadrature |






Fundamental theorem edit
Let pn be a nontrivial polynomial of degree n such that

Note that this will be true for all the orthogonal polynomials above, because each pn is constructed to be orthogonal to the other polynomials pj for j<n, and xk is in the span of that set.
If we pick the n nodes xi to be the zeros of pn, then there exist n weights wi which make the Gaussian quadrature computed integral exact for all polynomials h(x) of degree 2n − 1 or less. Furthermore, all these nodes xi will lie in the open interval (a, b).[4]
To prove the first part of this claim, let h(x) be any polynomial of degree 2n − 1 or less. Divide it by the orthogonal polynomial pn to get


Since the remainder r(x) is of degree n − 1 or less, we can interpolate it exactly using n interpolation points with Lagrange polynomials li(x), where

We have

Then its integral will equal

where wi, the weight associated with the node xi, is defined to equal the weighted integral of li(x) (see below for other formulas for the weights). But all the xi are roots of pn, so the division formula above tells us that


This proves that for any polynomial h(x) of degree 2n − 1 or less, its integral is given exactly by the Gaussian quadrature sum.
To prove the second part of the claim, consider the factored form of the polynomial pn. Any complex conjugate roots will yield a quadratic factor that is either strictly positive or strictly negative over the entire real line. Any factors for roots outside the interval from a to b will not change sign over that interval. Finally, for factors corresponding to roots xi inside the interval from a to b that are of odd multiplicity, multiply pn by one more factor to make a new polynomial

This polynomial cannot change sign over the interval from a to b because all its roots there are now of even multiplicity. So the integral


General formula for the weights edit
The weights can be expressed as
-
(1)

where is the coefficient of in . To prove this, note that using Lagrange interpolation one can express r(x) in terms of as






The weights wi are thus given by

This integral expression for can be expressed in terms of the orthogonal polynomials and as follows.



We can write

where is the coefficient of in . Taking the limit of x to yields using L'Hôpital's rule




We can thus write the integral expression for the weights as
-
(2)

In the integrand, writing

yields

provided , because



We can evaluate the integral on the right hand side for as follows. Because is a polynomial of degree n − 1, we have





We can then write

The term in the brackets is a polynomial of degree , which is therefore orthogonal to . The integral can thus be written as

According to equation (2), the weights are obtained by dividing this by and that yields the expression in equation (1).

can also be expressed in terms of the orthogonal polynomials and now . In the 3-term recurrence relation the term with vanishes, so in Eq. (1) can be replaced by .





Proof that the weights are positive edit
Consider the following polynomial of degree







Since both and are non-negative functions, it follows that .


Computation of Gaussian quadrature rules edit
There are many algorithms for computing the nodes xi and weights wi of Gaussian quadrature rules. The most popular are the Golub-Welsch algorithm requiring O(n2) operations, Newton's method for solving using the three-term recurrence for evaluation requiring O(n2) operations, and asymptotic formulas for large n requiring O(n) operations.

Recurrence relation edit
Orthogonal polynomials with for for a scalar product , degree and leading coefficient one (i.e. monic orthogonal polynomials) satisfy the recurrence relation






and scalar product defined

for where n is the maximal degree which can be taken to be infinity, and where . First of all, the polynomials defined by the recurrence relation starting with have leading coefficient one and correct degree. Given the starting point by , the orthogonality of can be shown by induction. For one has






Now if are orthogonal, then also , because in





However, if the scalar product satisfies (which is the case for Gaussian quadrature), the recurrence relation reduces to a three-term recurrence relation: For is a polynomial of degree less than or equal to r − 1. On the other hand, is orthogonal to every polynomial of degree less than or equal to r − 1. Therefore, one has and for s < r − 1. The recurrence relation then simplifies to





or

(with the convention ) where


(the last because of , since differs from by a degree less than r).


The Golub-Welsch algorithm edit
The three-term recurrence relation can be written in matrix form where , is the th standard basis vector, i.e., , and J is the following tridiagonal matrix, called the Jacobi matrix:





The zeros of the polynomials up to degree n, which are used as nodes for the Gaussian quadrature can be found by computing the eigenvalues of this matrix. This procedure is known as Golub–Welsch algorithm.

For computing the weights and nodes, it is preferable to consider the symmetric tridiagonal matrix with elements

![{\displaystyle {\begin{aligned}{\mathcal {J}}_{k,i}=J_{k,i}&=a_{k-1}&k&=1,2,\ldots ,n\\[2.1ex]{\mathcal {J}}_{k-1,i}={\mathcal {J}}_{k,k-1}={\sqrt {J_{k,k-1}J_{k-1,k}}}&={\sqrt {b_{k-1}}}&k&={\hphantom {1,\,}}2,\ldots ,n.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b6d6862323f0295b30a6b4768f95374d4e7be7d5)
That is,

J and are similar matrices and therefore have the same eigenvalues (the nodes). The weights can be computed from the corresponding eigenvectors: If is a normalized eigenvector (i.e., an eigenvector with euclidean norm equal to one) associated with the eigenvalue xj, the corresponding weight can be computed from the first component of this eigenvector, namely:


where is the integral of the weight function


See, for instance, (Gil, Segura & Temme 2007) for further details.
Error estimates edit
The error of a Gaussian quadrature rule can be stated as follows.[5] For an integrand which has 2n continuous derivatives,


In the important special case of ω(x) = 1, we have the error estimate[6]
![{\displaystyle {\frac {\left(b-a\right)^{2n+1}\left(n!\right)^{4}}{(2n+1)\left[\left(2n\right)!\right]^{3}}}f^{(2n)}(\xi ),\qquad a<\xi <b.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/55978744de6e75175beed299cc41fd11d8cdddc9)
Stoer and Bulirsch remark that this error estimate is inconvenient in practice, since it may be difficult to estimate the order 2n derivative, and furthermore the actual error may be much less than a bound established by the derivative. Another approach is to use two Gaussian quadrature rules of different orders, and to estimate the error as the difference between the two results. For this purpose, Gauss–Kronrod quadrature rules can be useful.
Gauss–Kronrod rules edit
If the interval [a, b] is subdivided, the Gauss evaluation points of the new subintervals never coincide with the previous evaluation points (except at zero for odd numbers), and thus the integrand must be evaluated at every point. Gauss–Kronrod rules are extensions of Gauss quadrature rules generated by adding n + 1 points to an n-point rule in such a way that the resulting rule is of order 2n + 1. This allows for computing higher-order estimates while re-using the function values of a lower-order estimate. The difference between a Gauss quadrature rule and its Kronrod extension is often used as an estimate of the approximation error.
Gauss–Lobatto rules edit
Also known as Lobatto quadrature,[7] named after Dutch mathematician Rehuel Lobatto. It is similar to Gaussian quadrature with the following differences:
- The integration points include the end points of the integration interval.
- It is accurate for polynomials up to degree 2n – 3, where n is the number of integration points.[8]
Lobatto quadrature of function f(x) on interval [−1, 1]:
![{\displaystyle \int _{-1}^{1}{f(x)\,dx}={\frac {2}{n(n-1)}}[f(1)+f(-1)]+\sum _{i=2}^{n-1}{w_{i}f(x_{i})}+R_{n}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/debe72ac248f8ae18af6b8814511b7068487ba24)
Abscissas: xi is the st zero of , here denotes the standard Legendre polynomial of m-th degree and the dash denotes the derivative.



Weights:
![{\displaystyle w_{i}={\frac {2}{n(n-1)\left[P_{n-1}\left(x_{i}\right)\right]^{2}}},\qquad x_{i}\neq \pm 1.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ef48203f09833d6a365e378e786320cbca4938f7)
Remainder:
![{\displaystyle R_{n}={\frac {-n\left(n-1\right)^{3}2^{2n-1}\left[\left(n-2\right)!\right]^{4}}{(2n-1)\left[\left(2n-2\right)!\right]^{3}}}f^{(2n-2)}(\xi ),\qquad -1<\xi <1.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3958e99104629c7d8c85c193a735f2ddea4652db)
Some of the weights are:
| Number of points, n | Points, xi | Weights, wi |
|---|---|---|



























An adaptive variant of this algorithm with 2 interior nodes[9] is found in GNU Octave and MATLAB as quadl and integrate.[10][11]
References edit
Citations edit
- ^ Gauss 1815
- ^ Jacobi 1826
- ^ Abramowitz & Stegun 1983, p. 887
- ^ Stoer & Bulirsch 2002, pp. 172–175
- ^ Stoer & Bulirsch 2002, Thm 3.6.24
- ^ Kahaner, Moler & Nash 1989, §5.2
- ^ Abramowitz & Stegun 1983, p. 888
- ^ Quarteroni, Sacco & Saleri 2000
- ^ Gander & Gautschi 2000
- ^ MathWorks 2012
- ^ Eaton et al. 2018
Bibliography edit
- Abramowitz, Milton; Stegun, Irene Ann, eds. (1983) [June 1964]. "Chapter 25.4, Integration". Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables. Applied Mathematics Series. Vol. 55 (Ninth reprint with additional corrections of tenth original printing with corrections (December 1972); first ed.). Washington D.C.; New York: United States Department of Commerce, National Bureau of Standards; Dover Publications. ISBN 978-0-486-61272-0. LCCN 64-60036. MR 0167642. LCCN 65-12253.
- Anderson, Donald G. (1965). "Gaussian quadrature formulae for ". Math. Comp. 19 (91): 477–481. doi:10.1090/s0025-5718-1965-0178569-1.
- Danloy, Bernard (1973). "Numerical construction of Gaussian quadrature formulas for and ". Math. Comp. Vol. 27, no. 124. pp. 861–869. doi:10.1090/S0025-5718-1973-0331730-X. MR 0331730.
- Eaton, John W.; Bateman, David; Hauberg, Søren; Wehbring, Rik (2018). "Functions of One Variable (GNU Octave)". Retrieved 28 September 2018.
- Gander, Walter; Gautschi, Walter (2000). "Adaptive Quadrature - Revisited". BIT Numerical Mathematics. 40 (1): 84–101. doi:10.1023/A:1022318402393.
- Gauss, Carl Friedrich (1815). Methodus nova integralium valores per approximationem inveniendi. Comm. Soc. Sci. Göttingen Math. Vol. 3. S. 29–76. datiert 1814, auch in Werke, Band 3, 1876, S. 163–196. English Translation by Wikisource.
- Gautschi, Walter (1968). "Construction of Gauss–Christoffel Quadrature Formulas". Math. Comp. Vol. 22, no. 102. pp. 251–270. doi:10.1090/S0025-5718-1968-0228171-0. MR 0228171.
- Gautschi, Walter (1970). "On the construction of Gaussian quadrature rules from modified moments". Math. Comp. Vol. 24. pp. 245–260. doi:10.1090/S0025-5718-1970-0285117-6. MR 0285177.
- Gautschi, Walter (2020). A Software Repository for Gaussian Quadratures and Christoffel Functions. SIAM. ISBN 978-1-611976-34-2.
- Gil, Amparo; Segura, Javier; Temme, Nico M. (2007), "§5.3: Gauss quadrature", Numerical Methods for Special Functions, SIAM, ISBN 978-0-89871-634-4
- Golub, Gene H.; Welsch, John H. (1969). "Calculation of Gauss Quadrature Rules". Mathematics of Computation. 23 (106): 221–230. doi:10.1090/S0025-5718-69-99647-1. JSTOR 2004418.
- Jacobi, C. G. J. (1826). "Ueber Gauß' neue Methode, die Werthe der Integrale näherungsweise zu finden". Journal für Reine und Angewandte Mathematik. 1. S. 301–308und Werke, Band 6.
{{cite journal}}: CS1 maint: postscript (link) - Kabir, Hossein; Matikolaei, Sayed Amir Hossein Hassanpour (2017). "Implementing an Accurate Generalized Gaussian Quadrature Solution to Find the Elastic Field in a Homogeneous Anisotropic Media". Journal of the Serbian Society for Computational Mechanics. 11 (1): 11–19. doi:10.24874/jsscm.2017.11.01.02.
- Kahaner, David; Moler, Cleve; Nash, Stephen (1989). Numerical Methods and Software. Prentice-Hall. ISBN 978-0-13-627258-8.
- Laudadio, Teresa; Mastronardi, Nicola; Van Dooren, Paul (2023). "Computing Gaussian quadrature rules with high relative accuracy". Numerical Algorithms. 92: 767–793. doi:10.1007/s11075-022-01297-9.
- Laurie, Dirk P. (1999), "Accurate recovery of recursion coefficients from Gaussian quadrature formulas", J. Comput. Appl. Math., 112 (1–2): 165–180, doi:10.1016/S0377-0427(99)00228-9
- Laurie, Dirk P. (2001). "Computation of Gauss-type quadrature formulas". J. Comput. Appl. Math. 127 (1–2): 201–217. Bibcode:2001JCoAM.127..201L. doi:10.1016/S0377-0427(00)00506-9.
- MathWorks (2012). "Numerical integration - MATLAB integral".
- Piessens, R. (1971). "Gaussian quadrature formulas for the numerical integration of Bromwich's integral and the inversion of the laplace transform". J. Eng. Math. Vol. 5, no. 1. pp. 1–9. Bibcode:1971JEnMa...5....1P. doi:10.1007/BF01535429.
- Press, WH; Teukolsky, SA; Vetterling, WT; Flannery, BP (2007), "Section 4.6. Gaussian Quadratures and Orthogonal Polynomials", Numerical Recipes: The Art of Scientific Computing (3rd ed.), New York: Cambridge University Press, ISBN 978-0-521-88068-8
- Quarteroni, Alfio; Sacco, Riccardo; Saleri, Fausto (2000). Numerical Mathematics. New York: Springer-Verlag. pp. 425–478. doi:10.1007/978-3-540-49809-4_10. ISBN 0-387-98959-5.
- Riener, Cordian; Schweighofer, Markus (2018). "Optimization approaches to quadrature: New characterizations of Gaussian quadrature on the line and quadrature with few nodes on plane algebraic curves, on the plane and in higher dimensions". Journal of Complexity. 45: 22–54. arXiv:1607.08404. doi:10.1016/j.jco.2017.10.002.
- Sagar, Robin P. (1991). "A Gaussian quadrature for the calculation of generalized Fermi-Dirac integrals". Comput. Phys. Commun. 66 (2–3): 271–275. Bibcode:1991CoPhC..66..271S. doi:10.1016/0010-4655(91)90076-W.
- Stoer, Josef; Bulirsch, Roland (2002), Introduction to Numerical Analysis (3rd ed.), Springer, ISBN 978-0-387-95452-3
- Temme, Nico M. (2010), "§3.5(v): Gauss Quadrature", in Olver, Frank W. J.; Lozier, Daniel M.; Boisvert, Ronald F.; Clark, Charles W. (eds.), NIST Handbook of Mathematical Functions, Cambridge University Press, ISBN 978-0-521-19225-5, MR 2723248.
- Yakimiw, E. (1996). "Accurate computation of weights in classical Gauss–Christoffel quadrature rules". J. Comput. Phys. 129 (2): 406–430. Bibcode:1996JCoPh.129..406Y. doi:10.1006/jcph.1996.0258.



External links edit
- "Gauss quadrature formula", Encyclopedia of Mathematics, EMS Press, 2001 [1994]
- ALGLIB contains a collection of algorithms for numerical integration (in C# / C++ / Delphi / Visual Basic / etc.)
- GNU Scientific Library — includes C version of QUADPACK algorithms (see also GNU Scientific Library)
- From Lobatto Quadrature to the Euler constant e
- Gaussian Quadrature Rule of Integration – Notes, PPT, Matlab, Mathematica, Maple, Mathcad at Holistic Numerical Methods Institute
- Weisstein, Eric W. "Legendre-Gauss Quadrature". MathWorld.
- Gaussian Quadrature by Chris Maes and Anton Antonov, Wolfram Demonstrations Project.
- Tabulated weights and abscissae with Mathematica source code, high precision (16 and 256 decimal places) Legendre-Gaussian quadrature weights and abscissas, for n=2 through n=64, with Mathematica source code.
- Mathematica source code distributed under the GNU LGPL for abscissas and weights generation for arbitrary weighting functions W(x), integration domains and precisions.
- Gaussian Quadrature in Boost.Math, for arbitrary precision and approximation order
- Gauss–Kronrod Quadrature in Boost.Math
- Nodes and Weights of Gaussian quadrature