


Summary
Rapidity is a measure for relativistic velocity. For one-dimensional motion, rapidities are additive. However, velocities must be combined by Einstein's velocity-addition formula. For low speeds, rapidity and velocity are almost exactly proportional but, for higher velocities, rapidity takes a larger value, with the rapidity of light being infinite.
Mathematically, rapidity can be defined as the hyperbolic angle that differentiates two frames of reference in relative motion, each frame being associated with distance and time coordinates.
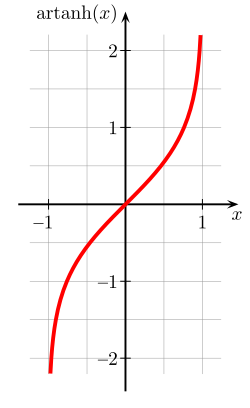
Using the inverse hyperbolic function artanh, the rapidity w corresponding to velocity v is w = artanh(v / c) where c is the velocity of light. For low speeds, w is approximately v / c. Since in relativity any velocity v is constrained to the interval −c < v < c the ratio v / c satisfies −1 < v / c < 1. The inverse hyperbolic tangent has the unit interval (−1, 1) for its domain and the whole real line for its image; that is, the interval −c < v < c maps onto −∞ < w < ∞.
History edit
In 1908 Hermann Minkowski explained how the Lorentz transformation could be seen as simply a hyperbolic rotation of the spacetime coordinates, i.e., a rotation through an imaginary angle.[1] This angle therefore represents (in one spatial dimension) a simple additive measure of the velocity between frames.[2] The rapidity parameter replacing velocity was introduced in 1910 by Vladimir Varićak[3] and by E. T. Whittaker.[4] The parameter was named rapidity by Alfred Robb (1911)[5] and this term was adopted by many subsequent authors, such as Ludwik Silberstein (1914), Frank Morley (1936) and Wolfgang Rindler (2001).
Area of a hyperbolic sector edit
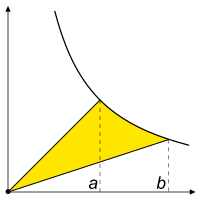
The quadrature of the hyperbola xy = 1 by Grégoire de Saint-Vincent established the natural logarithm as the area of a hyperbolic sector or an equivalent area against an asymptote. In spacetime theory, the connection of events by light divides the universe into Past, Future, or Elsewhere based on a Here and Now [clarification needed]. On any line in space, a light beam may be directed left or right. Take the x-axis as the events passed by the right beam and the y-axis as the events of the left beam. Then a resting frame has time along the diagonal x = y. The rectangular hyperbola xy = 1 can be used to gauge velocities (in the first quadrant). Zero velocity corresponds to (1,1). Any point on the hyperbola has light-cone coordinates where w is the rapidity, and is equal to the area of the hyperbolic sector from (1,1) to these coordinates. Many authors refer instead to the unit hyperbola using rapidity for a parameter, as in the standard spacetime diagram. There the axes are measured by clock and meter-stick, more familiar benchmarks, and the basis of spacetime theory. So the delineation of rapidity as a hyperbolic parameter of beam-space is a reference[clarification needed] to the seventeenth-century origin of our precious transcendental functions, and a supplement to spacetime diagramming.


Lorentz boost edit
The rapidity w arises in the linear representation of a Lorentz boost as a vector-matrix product

The matrix Λ(w) is of the type with p and q satisfying p2 – q2 = 1, so that (p, q) lies on the unit hyperbola. Such matrices form the indefinite orthogonal group O(1,1) with one-dimensional Lie algebra spanned by the anti-diagonal unit matrix, showing that the rapidity is the coordinate on this Lie algebra. This action may be depicted in a spacetime diagram. In matrix exponential notation, Λ(w) can be expressed as , where Z is the negative of the anti-diagonal unit matrix



It is not hard to prove that


As we can see from the Lorentz transformation above, the Lorentz factor identifies with cosh w




Proper acceleration (the acceleration 'felt' by the object being accelerated) is the rate of change of rapidity with respect to proper time (time as measured by the object undergoing acceleration itself). Therefore, the rapidity of an object in a given frame can be viewed simply as the velocity of that object as would be calculated non-relativistically by an inertial guidance system on board the object itself if it accelerated from rest in that frame to its given speed.
The product of β and γ appears frequently, and is from the above arguments

Exponential and logarithmic relations edit
From the above expressions we have


![{\displaystyle w=\ln \left[\gamma (1+\beta )\right]=-\ln \left[\gamma (1-\beta )\right]\,.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/dcb179378e78f3158c7b9778cc6ed04fa2eb02c1)
The Doppler-shift factor associated with rapidity w is .

In experimental particle physics edit
The energy E and scalar momentum |p| of a particle of non-zero (rest) mass m are given by:





So, rapidity can be calculated from measured energy and momentum by

However, experimental particle physicists often use a modified definition of rapidity relative to a beam axis

Rapidity relative to a beam axis can also be expressed as

See also edit
Notes and references edit
- ^ Hermann Minkowski (1908) Fundamental Equations for Electromagnetic Processes in Moving Bodies via Wikisource
- ^ Sommerfeld, Phys. Z 1909
- ^ Vladimir Varicak (1910) Application of Lobachevskian Geometry in the Theory of Relativity Physikalische Zeitschrift via Wikisource
- ^ E. T. Whittaker (1910) A History of the Theories of Aether and Electricity, page 441.
- ^ Alfred Robb (1911) Optical Geometry of Motion p.9
- ^ Amsler, C. et al., "The Review of Particle Physics", Physics Letters B 667 (2008) 1, Section 38.5.2
- Vladimir Varićak (1910, 1912, 1924), see Vladimir Varićak#Publications
- Whittaker, Edmund Taylor (1910). "A History of the Theories of Aether and Electricity": 441.
{{cite journal}}: Cite journal requires|journal=(help) - Robb, Alfred (1911). Optical geometry of motion, a new view of the theory of relativity. Cambridge: Heffner & Sons.
- Émile Borel (1913), La théorie de la relativité et la cinématique (in French), Comptes rendus de l'Académie des Sciences, Paris: volume 156, pages 215-218; volume 157, pages 703-705
- Silberstein, Ludwik (1914). The Theory of Relativity. London: Macmillan & Co.
- Vladimir Karapetoff (1936), "Restricted relativity in terms of hyperbolic functions of rapidities", American Mathematical Monthly, volume 43, page 70.
- Frank Morley (1936), "When and Where", The Criterion, edited by Thomas Stearns Eliot, volume 15, pages 200-209.
- Wolfgang Rindler (2001) Relativity: Special, General, and Cosmological, page 53, Oxford University Press.
- Shaw, Ronald (1982) Linear Algebra and Group Representations, volume 1, page 229, Academic Press ISBN 0-12-639201-3.
- Walter, Scott (1999). "The non-Euclidean style of Minkowskian relativity" (PDF). In Jeremy John Gray (ed.). The Symbolic Universe: Geometry and Physics. Oxford University Press. pp. 91–127. Archived from the original (PDF) on 2013-10-16. Retrieved 2009-01-08.(see page 17 of e-link)
- Rhodes, John A.; Semon, Mark D. (2004). "Relativistic velocity space, Wigner rotation, and Thomas precession". American Journal of Physics. 72 (7): 90–93. arXiv:gr-qc/0501070. Bibcode:2004AmJPh..72..943R. doi:10.1119/1.1652040. S2CID 14764378.
- Jackson, John David (1999) [1962]. "Chapter 11". Classical Electrodynamics (3rd ed.). John Wiley & Sons. ISBN 0-471-30932-X.