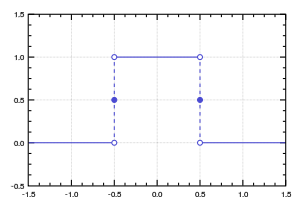
The rectangular function (also known as the rectangle function, rect function, Pi function, Heaviside Pi function,[1]gate function, unit pulse, or the normalized boxcar function) is defined as[2]
Rectangular function with a = 1
Alternative definitions of the function define to be 0,[3] 1,[4][5] or undefined.
using ordinary frequency f, where is the normalized form[10] of the sinc function and
using angular frequency , where is the unnormalized form of the sinc function.
For , its Fourier transform is
Note that as long as the definition of the pulse function is only motivated by its behavior in the time-domain experience, there is no reason to believe that the oscillatory interpretation (i.e. the Fourier transform function) should be intuitive, or directly understood by humans. However, some aspects of the theoretical result may be understood intuitively, as finiteness in time domain corresponds to an infinite frequency response. (Vice versa, a finite Fourier transform will correspond to infinite time domain response.)
For a function , its average over the width around 0 in the function domain is calculated as,
To obtain , the following limit is applied,
and this can be written in terms of the Dirac delta function as,
The Fourier transform of the Dirac delta function is
where the sinc function here is the normalized sinc function. Because the first zero of the sinc function is at and goes to infinity, the Fourier transform of is
means that the frequency spectrum of the Dirac delta function is infinitely broad. As a pulse is shorten in time, it is larger in spectrum.
^Wang, Ruye (2012). Introduction to Orthogonal Transforms: With Applications in Data Processing and Analysis. Cambridge University Press. pp. 135–136. ISBN 9780521516884.
^Tang, K. T. (2007). Mathematical Methods for Engineers and Scientists: Fourier analysis, partial differential equations and variational models. Springer. p. 85. ISBN 9783540446958.
^Kumar, A. Anand (2011). Signals and Systems. PHI Learning Pvt. Ltd. pp. 258–260. ISBN 9788120343108.
^Klauder, John R (1960). "The Theory and Design of Chirp Radars". Bell System Technical Journal. 39 (4): 745–808. doi:10.1002/j.1538-7305.1960.tb03942.x.
^Woodward, Philipp M (1953). Probability and Information Theory, with Applications to Radar. Pergamon Press. p. 29.
^Higgins, John Rowland (1996). Sampling Theory in Fourier and Signal Analysis: Foundations. Oxford University Press Inc. p. 4. ISBN 0198596995.
^Zayed, Ahmed I (1996). Handbook of Function and Generalized Function Transformations. CRC Press. p. 507. ISBN 9780849380761.