


Summary
In computational geometry, the method of rotating calipers is an algorithm design technique that can be used to solve optimization problems including finding the width or diameter of a set of points.

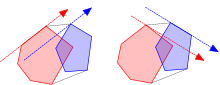
The method is so named because the idea is analogous to rotating a spring-loaded vernier caliper around the outside of a convex polygon.[1] Every time one blade of the caliper lies flat against an edge of the polygon, it forms an antipodal pair with the point or edge touching the opposite blade. The complete "rotation" of the caliper around the polygon detects all antipodal pairs; the set of all pairs, viewed as a graph, forms a thrackle. The method of rotating calipers can be interpreted as the projective dual of a sweep line algorithm in which the sweep is across slopes of lines rather than across x- or y-coordinates of points.
History edit

The rotating calipers method was first used in the dissertation of Michael Shamos in 1978.[2] Shamos used this method to generate all antipodal pairs of points on a convex polygon and to compute the diameter of a convex polygon in time. Godfried Toussaint coined the phrase "rotating calipers" and demonstrated that the method was applicable in solving many other computational geometry problems.[3]

Shamos's algorithm edit
Shamos gave the following algorithm in his dissertation (pp. 77–82) for the rotating calipers method, which generated all antipodal pairs of vertices on a convex polygon:[2]
/* p[] is in standard form, ie, counter clockwise order,
distinct vertices, no collinear vertices.
ANGLE(m, n) is a procedure that returns the clockwise angle
swept out by a ray as it rotates from a position parallel
to the directed segment Pm,Pm+1 to a position parallel to Pn, Pn+1
We assume all indices are reduced to mod N (so that N+1 = 1).
*/
GetAllAntiPodalPairs(p[1..n])
// Find first anti-podal pair by locating vertex opposite P1
i = 1
j = 2
while angle(i, j) < pi
j++
yield i, j
/* Now proceed around the polygon taking account of
possibly parallel edges. Line L passes through
Pi, Pi+1 and M passes through Pj, Pj+1
*/
// Loop on j until all of P has been scanned
current = i
while j != n
if angle(current, i + 1) <= angle(current, j + 1)
j++
current = j
else
i++
current = i
yield i, j
// Now take care of parallel edges
if angle(current, i + 1) = angle(current, j + 1)
yield i + 1, j
yield i, j + 1
yield i + 1, j + 1
if current = i
j++
else
i++
Another version of this algorithm appeared in the text by Preparata and Shamos in 1985 that avoided calculation of angles:[4]
GetAllAntiPodalPairs(p[1..n])
i0 = n
i = 1
j = i + 1
while (Area(i, i + 1, j + 1) > Area(i, i + 1, j))
j = j + 1
j0 = j
while (i != j0)
i = i + 1
yield i, j
while (Area(i, i + 1, j + 1) > Area(i, i + 1, j))
j = j + 1
if ((i, j) != (j0, i0))
yield i, j
else
return
if (Area(j, i + 1, j + 1) = Area(i, i + 1, j))
if ((i, j) != (j0, i0))
yield i, j + 1
else
yield i + 1, j
Applications edit
Pirzadeh[5] describes various applications of rotating calipers method.
Distances edit
- Diameter (maximum width) of a convex polygon[6][7]
- Width (minimum width) of a convex polygon[8]
- Maximum distance between two convex polygons[9][10]
- Minimum distance between two convex polygons[11][12]
- Widest empty (or separating) strip between two convex polygons (a simplified low-dimensional variant of a problem arising in support vector machine based machine learning)
- Grenander distance between two convex polygons[13]
- Optimal strip separation (used in medical imaging and solid modeling)[14]
Bounding boxes edit
- Minimum area oriented bounding box
- Minimum perimeter oriented bounding box
Triangulations edit
- Onion triangulations
- Spiral triangulations
- Quadrangulation
- Nice triangulation
- Art gallery problem
- Wedge placement optimization problem[15]
Multi-polygon operations edit
- Union of two convex polygons
- Common tangents to two convex polygons
- Intersection of two convex polygons[16]
- Critical support lines of two convex polygons
- Vector sums (or Minkowski sum) of two convex polygons[17]
- Convex hull of two convex polygons
Traversals edit
Others edit
See also edit
References edit
- ^ "Rotating Calipers" at Toussaint's home page
- ^ a b Shamos, Michael (1978). "Computational Geometry" (PDF). Yale University. pp. 76–81.
- ^ Toussaint, Godfried T. (1983). "Solving geometric problems with the rotating calipers". In Protonotarios, E. N.; Stassinopoulos, G. I.; Civalleri, P. P. (eds.). Proceedings of MELECON '83, Mediterranean Electrotechnical Conference, Athens, Greece, 24–26 May 1983. IEEE. pp. A10.02/1–4. CiteSeerX 10.1.1.155.5671.
- ^ Shamos, Franco P. Preparata, Michael Ian (1985). Computational Geometry An Introduction. New York, NY: Springer New York. ISBN 978-1-4612-7010-2.
{{cite book}}: CS1 maint: multiple names: authors list (link) - ^ Pirzadeh, Hormoz (1999). Computational geometry with the rotating calipers (Master's thesis). McGill University.
- ^ Binay K. Bhattacharya and Godfried T. Toussaint, "Fast algorithms for computing the diameter of a finite planar set," The Visual Computer, Vol. 3, No. 6, May 1988, pp.379–388.
- ^ Binay K. Bhattacharya and Godfried T. Toussaint, "A counter example to a diameter algorithm for convex polygons," IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. PAMI-4, No. 3, May 1982, pp. 306–309.
- ^ Michael E. Houle and Godfried T. Toussaint, "Computing the width of a set," IEEE Transactions on Pattern Analysis & Machine Intelligence, Vol. 10, no. 5, September 1988, pp. 761–765.
- ^ Godfried T. Toussaint and Jim A. McAlear, "A simple O(n log n) algorithm for finding the maximum distance between two finite planar sets," Pattern Recognition Letters, Vol. 1, 1982, pp. 21–24.
- ^ Binay K. Bhattacharya and Godfried T. Toussaint, "Efficient algorithms for computing the maximum distance between two finite planar sets," Journal of Algorithms, vol. 14, 1983, pp. 121–136.
- ^ Godfried T. Toussaint and Binay K. Bhattacharya, "Optimal algorithms for computing the minimum distance between two finite planar sets," Pattern Recognition Letters, vol. 2, December, 1983, pp. 79–82.
- ^ "Rotating Calipers". 2015-03-30. Archived from the original on 2015-03-30. Retrieved 2017-03-22.
{{cite web}}: CS1 maint: bot: original URL status unknown (link) - ^ MARTINEZ, HUGO M. (January 1, 1978). "Review of: "PATTERN SYNTHESIS", by U. Grenander, Springer-Verlag, New York, 1976. 509 pp". International Journal of General Systems. 4 (2): 126–127. doi:10.1080/03081077808960672. ISSN 0308-1079.
- ^ Barequet and Wolfers (1998). "Optimizing a Strip Separating Two Polygons". Graphical Models and Image Processing. 60 (3): 214–221. doi:10.1006/gmip.1998.0470.
- ^ Teichmann, Marek (1989). Wedge placement optimization problems (Master's thesis). McGill University.
- ^ Godfried T. Toussaint, "A simple linear algorithm for intersecting convex polygons, The Visual Computer, Vol. 1, 1985, pp. 118–123.
- ^ Tomas Lozano-Perez, "Spatial planning: A configuration space approach," IEEE Transactions on Computers, Vol. 32, No. 2, 1983, pp. 108–120.
- ^ Binay K. Bhattacharya and Godfried T. Toussaint, "Computing shortest transversals," Computing, vol. 46, 1991, pp. 93–119.
- ^ Binay K. Bhattacharya, Jurek Czyzowicz, Peter Egyed, Ivan Stojmenovic, Godfried T. Toussaint, and Jorje Urrutia, "Computing shortest transversals of sets," International Journal of Computational Geometry and Applications, Vol. 2, No. 4, December 1992, pp. 417–436.
- ^ Jean-Marc Robert and Godfried T. Toussaint, "Linear approximation of simple objects," Computational Geometry: Theory and Applications, Vol. 4, 1994, pp. 27–52.
- ^ Rasson and Granville (1996). "Geometrical tools in classification". Computational Statistics & Data Analysis. 23 (1): 105–123. doi:10.1016/S0167-9473(96)00024-2.
- ^ Bose, P.; Hurtado-Diaz, F.; Omaña-Pulido, E.; Snoeyink, J.; Toussaint, G. T. (2002-08-01). "Some Aperture-Angle Optimization Problems". Algorithmica. 33 (4): 411–435. CiteSeerX 10.1.1.16.7118. doi:10.1007/s00453-001-0112-9. ISSN 0178-4617. S2CID 27455160.
- ^ "Incorrect Diameter Algorithms for Convex Polygons".