The standard letters to denote the Levi-Civita symbol are the Greek lower case epsilonε or ϵ, or less commonly the Latin lower case e. Index notation allows one to display permutations in a way compatible with tensor analysis:
where each index i1, i2, ..., in takes values 1, 2, ..., n. There are nn indexed values of εi1i2...in, which can be arranged into an n-dimensional array. The key defining property of the symbol is total antisymmetry in the indices. When any two indices are interchanged, equal or not, the symbol is negated:
If any two indices are equal, the symbol is zero. When all indices are unequal, we have:
where p (called the parity of the permutation) is the number of pairwise interchanges of indices necessary to unscramble i1, i2, ..., in into the order 1, 2, ..., n, and the factor (−1)p is called the sign, or signature of the permutation. The value ε1 2 ... n must be defined, else the particular values of the symbol for all permutations are indeterminate. Most authors choose ε1 2 ... n = +1, which means the Levi-Civita symbol equals the sign of a permutation when the indices are all unequal. This choice is used throughout this article.
The term "n-dimensional Levi-Civita symbol" refers to the fact that the number of indices on the symbol n matches the dimensionality of the vector space in question, which may be Euclidean or non-Euclidean, for example, or Minkowski space. The values of the Levi-Civita symbol are independent of any metric tensor and coordinate system. Also, the specific term "symbol" emphasizes that it is not a tensor because of how it transforms between coordinate systems; however it can be interpreted as a tensor density.
The Levi-Civita symbol is most often used in three and four dimensions, and to some extent in two dimensions, so these are given here before defining the general case.
Two dimensionsedit
In two dimensions, the Levi-Civita symbol is defined by:
Use of the two-dimensional symbol is common in condensed matter, and in certain specialized high-energy topics like supersymmetry[1] and twistor theory,[2] where it appears in the context of 2-spinors.
Three dimensionsedit
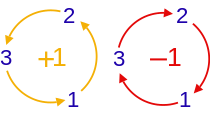
For the indices (i, j, k) in εijk, the values 1, 2, 3 occurring in the cyclic order (1, 2, 3) correspond to ε = +1, while occurring in the reverse cyclic order correspond to ε = −1, otherwise ε = 0.
That is, εijk is 1 if (i, j, k) is an even permutation of (1, 2, 3), −1 if it is an odd permutation, and 0 if any index is repeated. In three dimensions only, the cyclic permutations of (1, 2, 3) are all even permutations, similarly the anticyclic permutations are all odd permutations. This means in 3d it is sufficient to take cyclic or anticyclic permutations of (1, 2, 3) and easily obtain all the even or odd permutations.
Analogous to 2-dimensional matrices, the values of the 3-dimensional Levi-Civita symbol can be arranged into a 3 × 3 × 3 array:
where i is the depth (blue: i = 1; red: i = 2; green: i = 3), j is the row and k is the column.
Using the capital pi notationΠ for ordinary multiplication of numbers, an explicit expression for the symbol is:[citation needed]
where the signum function (denoted sgn) returns the sign of its argument while discarding the absolute value if nonzero. The formula is valid for all index values, and for any n (when n = 0 or n = 1, this is the empty product). However, computing the formula above naively has a time complexity of O(n2), whereas the sign can be computed from the parity of the permutation from its disjoint cycles in only O(n log(n)) cost.
Propertiesedit
A tensor whose components in an orthonormal basis are given by the Levi-Civita symbol (a tensor of covariant rank n) is sometimes called a permutation tensor.
Under the ordinary transformation rules for tensors the Levi-Civita symbol is unchanged under pure rotations, consistent with that it is (by definition) the same in all coordinate systems related by orthogonal transformations. However, the Levi-Civita symbol is a pseudotensor because under an orthogonal transformation of Jacobian determinant −1, for example, a reflection in an odd number of dimensions, it should acquire a minus sign if it were a tensor. As it does not change at all, the Levi-Civita symbol is, by definition, a pseudotensor.
As the Levi-Civita symbol is a pseudotensor, the result of taking a cross product is a pseudovector, not a vector.[5]
Under a general coordinate change, the components of the permutation tensor are multiplied by the Jacobian of the transformation matrix. This implies that in coordinate frames different from the one in which the tensor was defined, its components can differ from those of the Levi-Civita symbol by an overall factor. If the frame is orthonormal, the factor will be ±1 depending on whether the orientation of the frame is the same or not.[5]
In index-free tensor notation, the Levi-Civita symbol is replaced by the concept of the Hodge dual.[citation needed]
Summation symbols can be eliminated by using Einstein notation, where an index repeated between two or more terms indicates summation over that index. For example,
.
In the following examples, Einstein notation is used.
Two dimensionsedit
In two dimensions, when all i, j, m, n each take the values 1 and 2:[3]
(1)
(2)
(3)
Three dimensionsedit
Index and symbol valuesedit
In three dimensions, when all i, j, k, m, n each take values 1, 2, and 3:[3]
(4)
(5)
(6)
Productedit
The Levi-Civita symbol is related to the Kronecker delta. In three dimensions, the relationship is given by the following equations (vertical lines denote the determinant):[4]
A special case of this result occurs when one of the indices is repeated and summed over:
In Einstein notation, the duplication of the i index implies the sum on i. The previous is then denoted εijkεimn = δjmδkn − δjnδkm.
If two indices are repeated (and summed over), this further reduces to:
n dimensionsedit
Index and symbol valuesedit
In n dimensions, when all i1, ...,in, j1, ..., jn take values 1, 2, ..., n:[citation needed]
In general, for n dimensions, one can write the product of two Levi-Civita symbols as:
Proof: Both sides change signs upon switching two indices, so without loss of generality assume . If some then left side is zero, and right side is also zero since two of its rows are equal. Similarly for . Finally, if , then both sides are 1.
Proofsedit
For (1), both sides are antisymmetric with respect of ij and mn. We therefore only need to consider the case i ≠ j and m ≠ n. By substitution, we see that the equation holds for ε12ε12, that is, for i = m = 1 and j = n = 2. (Both sides are then one). Since the equation is antisymmetric in ij and mn, any set of values for these can be reduced to the above case (which holds). The equation thus holds for all values of ij and mn.
To establish (5), notice that both sides vanish when i ≠ j. Indeed, if i ≠ j, then one can not choose m and n such that both permutation symbols on the left are nonzero. Then, with i = j fixed, there are only two ways to choose m and n from the remaining two indices. For any such indices, we have
(no summation), and the result follows.
Then (6) follows since 3! = 6 and for any distinct indices i, j, k taking values 1, 2, 3, we have
Similarly the determinant of an n × n matrix A = [aij] can be written as[5]
where each ir should be summed over 1, ..., n, or equivalently:
where now each ir and each jr should be summed over 1, ..., n. More generally, we have the identity[5]
Vector cross productedit
Cross product (two vectors)edit
Let a positively oriented orthonormal basis of a vector space. If (a1, a2, a3) and (b1, b2, b3) are the coordinates of the vectorsa and b in this basis, then their cross product can be written as a determinant:[5]
hence also using the Levi-Civita symbol, and more simply:
In Einstein notation, the summation symbols may be omitted, and the ith component of their cross product equals[4]
The first component is
then by cyclic permutations of 1, 2, 3 the others can be derived immediately, without explicitly calculating them from the above formulae:
Triple scalar product (three vectors)edit
From the above expression for the cross product, we have:
which follows from the cross product expression above, substituting components of the gradient vector operator (nabla).
Tensor densityedit
In any arbitrary curvilinear coordinate system and even in the absence of a metric on the manifold, the Levi-Civita symbol as defined above may be considered to be a tensor density field in two different ways. It may be regarded as a contravariant tensor density of weight +1 or as a covariant tensor density of weight −1. In n dimensions using the generalized Kronecker delta,[7][8]
Notice that these are numerically identical. In particular, the sign is the same.
Levi-Civita tensorsedit
On a pseudo-Riemannian manifold, one may define a coordinate-invariant covariant tensor field whose coordinate representation agrees with the Levi-Civita symbol wherever the coordinate system is such that the basis of the tangent space is orthonormal with respect to the metric and matches a selected orientation. This tensor should not be confused with the tensor density field mentioned above. The presentation in this section closely follows Carroll 2004.
The covariant Levi-Civita tensor (also known as the Riemannian volume form) in any coordinate system that matches the selected orientation is
where gab is the representation of the metric in that coordinate system. We can similarly consider a contravariant Levi-Civita tensor by raising the indices with the metric as usual,
but notice that if the metric signature contains an odd number of negative eigenvalues q, then the sign of the components of this tensor differ from the standard Levi-Civita symbol:
where sgn(det[gab]) = (−1)q, and is the usual Levi-Civita symbol discussed in the rest of this article. More explicitly, when the tensor and basis orientation are chosen such that , we have that .
From this we can infer the identity,
where
is the generalized Kronecker delta.
Example: Minkowski spaceedit
In Minkowski space (the four-dimensional spacetime of special relativity), the covariant Levi-Civita tensor is
where the sign depends on the orientation of the basis. The contravariant Levi-Civita tensor is
The following are examples of the general identity above specialized to Minkowski space (with the negative sign arising from the odd number of negatives in the signature of the metric tensor in either sign convention):
^Labelle, P. (2010). Supersymmetry. Demystified. McGraw-Hill. pp. 57–58. ISBN 978-0-07-163641-4.
^Hadrovich, F. "Twistor Primer". Retrieved 2013-09-03.
^ abcTyldesley, J. R. (1973). An introduction to Tensor Analysis: For Engineers and Applied Scientists. Longman. ISBN 0-582-44355-5.
^ abcdKay, D. C. (1988). Tensor Calculus. Schaum's Outlines. McGraw Hill. ISBN 0-07-033484-6.
^ abcdeRiley, K. F.; Hobson, M. P.; Bence, S. J. (2010). Mathematical Methods for Physics and Engineering. Cambridge University Press. ISBN 978-0-521-86153-3.
^Lipcshutz, S.; Lipson, M. (2009). Linear Algebra. Schaum's Outlines (4th ed.). McGraw Hill. ISBN 978-0-07-154352-1.
^Murnaghan, F. D. (1925), "The generalized Kronecker symbol and its application to the theory of determinants", Amer. Math. Monthly, 32 (5): 233–241, doi:10.2307/2299191, JSTOR 2299191
^Lovelock, David; Rund, Hanno (1989). Tensors, Differential Forms, and Variational Principles. Courier Dover Publications. p. 113. ISBN 0-486-65840-6.
Referencesedit
Misner, C.; Thorne, K. S.; Wheeler, J. A. (1973). Gravitation. W. H. Freeman & Co. pp. 85–86, §3.5. ISBN 0-7167-0344-0.
Neuenschwander, D. E. (2015). Tensor Calculus for Physics. Johns Hopkins University Press. pp. 11, 29, 95. ISBN 978-1-4214-1565-9.
Carroll, Sean M. (2004), Spacetime and Geometry, Addison-Wesley, ISBN 0-8053-8732-3
External linksedit
This article incorporates material from Levi-Civita permutation symbol on PlanetMath, which is licensed under the Creative Commons Attribution/Share-Alike License.























![{\displaystyle {\begin{aligned}\varepsilon _{ijk}\varepsilon _{lmn}&={\begin{vmatrix}\delta _{il}&\delta _{im}&\delta _{in}\\\delta _{jl}&\delta _{jm}&\delta _{jn}\\\delta _{kl}&\delta _{km}&\delta _{kn}\\\end{vmatrix}}\\[6pt]&=\delta _{il}\left(\delta _{jm}\delta _{kn}-\delta _{jn}\delta _{km}\right)-\delta _{im}\left(\delta _{jl}\delta _{kn}-\delta _{jn}\delta _{kl}\right)+\delta _{in}\left(\delta _{jl}\delta _{km}-\delta _{jm}\delta _{kl}\right).\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/649e6209e5af520ca1a5ea07c33b58591565ab3a)































![{\displaystyle E_{a_{1}\dots a_{n}}={\sqrt {\left|\det[g_{ab}]\right|}}\,\varepsilon _{a_{1}\dots a_{n}}\,,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/37e9a92e440539e0513ae569542bc390a4f154c1)

![{\displaystyle E^{a_{1}\dots a_{n}}={\frac {\operatorname {sgn} \left(\det[g_{ab}]\right)}{\sqrt {\left|\det[g_{ab}]\right|}}}\,\varepsilon ^{a_{1}\dots a_{n}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6a560604067e888ef1a335e34f9e405519a8d818)

![{\textstyle E_{01\dots n}=+{\sqrt {\left|\det[g_{ab}]\right|}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/17ace6282f43d49b5451560f7ac626e66a7bc64e)
![{\displaystyle E^{01\dots n}={\frac {\operatorname {sgn}(\det[g_{ab}])}{\sqrt {\left|\det[g_{ab}]\right|}}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c6b580c03f614708b26f6c3723071527fd82f130)


![{\displaystyle E_{\alpha \beta \gamma \delta }=\pm {\sqrt {\left|\det[g_{\mu \nu }]\right|}}\,\varepsilon _{\alpha \beta \gamma \delta }\,,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/69cea2c0f47be8b11eed0db78ca4d4cb4cf5230d)

