


Summary
Neon is a chemical element; it has symbol Ne and atomic number 10. It is the second noble gas in the periodic table.[13] Neon is a colorless, odorless, inert monatomic gas under standard conditions, with approximately two-thirds the density of air.
 | ||||||||||||||||||||||||||
| Neon | ||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Appearance | colorless gas exhibiting an orange-red glow when placed in an electric field | |||||||||||||||||||||||||
| Standard atomic weight Ar°(Ne) | ||||||||||||||||||||||||||
| Neon in the periodic table | ||||||||||||||||||||||||||
| ||||||||||||||||||||||||||
| Atomic number (Z) | 10 | |||||||||||||||||||||||||
| Group | group 18 (noble gases) | |||||||||||||||||||||||||
| Period | period 2 | |||||||||||||||||||||||||
| Block | p-block | |||||||||||||||||||||||||
| Electron configuration | [He] 2s2 2p6 | |||||||||||||||||||||||||
| Electrons per shell | 2, 8 | |||||||||||||||||||||||||
| Physical properties | ||||||||||||||||||||||||||
| Phase at STP | gas | |||||||||||||||||||||||||
| Melting point | 24.56 K (−248.59 °C, −415.46 °F) | |||||||||||||||||||||||||
| Boiling point | 27.104 K (−246.046 °C, −410.883 °F) | |||||||||||||||||||||||||
| Density (at STP) | 0.9002 g/L | |||||||||||||||||||||||||
| when liquid (at b.p.) | 1.207 g/cm3[3] | |||||||||||||||||||||||||
| Triple point | 24.556 K, 43.37 kPa[4][5] | |||||||||||||||||||||||||
| Critical point | 44.4918 K, 2.7686 MPa[5] | |||||||||||||||||||||||||
| Heat of fusion | 0.335 kJ/mol | |||||||||||||||||||||||||
| Heat of vaporization | 1.71 kJ/mol | |||||||||||||||||||||||||
| Molar heat capacity | 20.79[6] J/(mol·K) | |||||||||||||||||||||||||
Vapor pressure
| ||||||||||||||||||||||||||
| Atomic properties | ||||||||||||||||||||||||||
| Oxidation states | common: (none) | |||||||||||||||||||||||||
| Ionization energies |
| |||||||||||||||||||||||||
| Covalent radius | 58 pm | |||||||||||||||||||||||||
| Van der Waals radius | 154 pm | |||||||||||||||||||||||||
 | ||||||||||||||||||||||||||
| Other properties | ||||||||||||||||||||||||||
| Natural occurrence | primordial | |||||||||||||||||||||||||
| Crystal structure | face-centered cubic (fcc) (cF4) | |||||||||||||||||||||||||
| Lattice constant |  | |||||||||||||||||||||||||
| Thermal conductivity | 49.1×10−3 W/(m⋅K) | |||||||||||||||||||||||||
| Magnetic ordering | diamagnetic[8] | |||||||||||||||||||||||||
| Molar magnetic susceptibility | −6.74×10−6 cm3/mol (298 K)[9] | |||||||||||||||||||||||||
| Bulk modulus | 654 GPa | |||||||||||||||||||||||||
| Speed of sound | 435 m/s (gas, at 0 °C) | |||||||||||||||||||||||||
| CAS Number | 7440-01-9 | |||||||||||||||||||||||||
| History | ||||||||||||||||||||||||||
| Prediction | William Ramsay (1897) | |||||||||||||||||||||||||
| Discovery and first isolation | William Ramsay & Morris Travers[10][11] (1898) | |||||||||||||||||||||||||
| Isotopes of neon | ||||||||||||||||||||||||||
| ||||||||||||||||||||||||||
Neon was discovered in 1898 alongside krypton and xenon, identified as one of the three remaining rare inert elements in dry air after the removal of nitrogen, oxygen, argon, and carbon dioxide. Its discovery was marked by the distinctive bright red emission spectrum it exhibited, leading to its immediate recognition as a new element. The name neon originates from the Greek word νέον, a neuter singular form of νέος (neos), meaning 'new'. Neon is a chemically inert gas, with no known uncharged neon compounds. Existing neon compounds are primarily ionic molecules or fragile molecules held together by van der Waals forces.
The synthesis of most neon in the cosmos resulted from the nuclear fusion within stars of oxygen and helium through the alpha-capture process. Despite its abundant presence in the universe and Solar System—ranking fifth in cosmic abundance following hydrogen, helium, oxygen, and carbon—neon is comparatively scarce on Earth. It constitutes about 18.2 ppm of Earth's atmospheric volume and a lesser fraction in the Earth's crust. The high volatility of neon and its inability to form compounds that would anchor it to solids explain its limited presence on Earth and the inner terrestrial planets. Neon’s high volatility facilitated its escape from planetesimals under the early Solar System's nascent Sun's warmth.
Neon's notable applications include its use in low-voltage neon glow lamps, high-voltage discharge tubes, and neon advertising signs, where it emits a distinct reddish-orange glow.[14][15] This same red emission line is responsible for the characteristic red light of helium–neon lasers. Although neon has some applications in plasma tubes and as a refrigerant, its commercial uses are relatively limited. It is primarily obtained through the fractional distillation of liquid air, making it significantly more expensive than helium due to air being its sole source.
History
edit
Neon was discovered in 1898 by the British chemists Sir William Ramsay (1852–1916) and Morris Travers (1872–1961) in London.[16] Neon was discovered when Ramsay chilled a sample of air until it became a liquid, then warmed the liquid and captured the gases as they boiled off. The gases nitrogen, oxygen, and argon had been identified, but the remaining gases were isolated in roughly their order of abundance, in a six-week period beginning at the end of May 1898. The first remaining gas to be identified was krypton; the next, after krypton had been removed, was a gas which gave a brilliant red light under spectroscopic discharge. This gas, identified in June, was named "neon", the Greek analogue of the Latin novum ('new')[17] suggested by Ramsay's son. The characteristic brilliant red-orange color emitted by gaseous neon when excited electrically was noted immediately. Travers later wrote: "the blaze of crimson light from the tube told its own story and was a sight to dwell upon and never forget."[18]
A second gas was also reported along with neon, having approximately the same density as argon but with a different spectrum – Ramsay and Travers named it metargon.[19][20] However, the subsequent spectroscopic analysis revealed it to be argon contaminated with carbon monoxide. Finally, the same team discovered xenon by the same process, in September 1898.[19]
Neon's scarcity precluded its prompt application for lighting along the lines of Moore tubes, which used nitrogen and which were commercialized in the early 1900s. After 1902, Georges Claude's company Air Liquide produced industrial quantities of neon as a byproduct of his air-liquefaction business. In December 1910 Claude demonstrated modern neon lighting based on a sealed tube of neon. Claude tried briefly to sell neon tubes for indoor domestic lighting, due to their intensity, but the market failed because homeowners objected to the color. In 1912, Claude's associate began selling neon discharge tubes as eye-catching advertising signs and was instantly more successful. Neon tubes were introduced to the U.S. in 1923 with two large neon signs bought by a Los Angeles Packard car dealership. The glow and arresting red color made neon advertising completely different from the competition.[21] The intense color and vibrancy of neon equated with American society at the time, suggesting a "century of progress" and transforming cities into sensational new environments filled with radiating advertisements and "electro-graphic architecture".[22][23]
Neon played a role in the basic understanding of the nature of atoms in 1913, when J. J. Thomson, as part of his exploration into the composition of canal rays, channeled streams of neon ions through a magnetic and an electric field and measured the deflection of the streams with a photographic plate. Thomson observed two separate patches of light on the photographic plate (see image), which suggested two different parabolas of deflection. Thomson eventually concluded that some of the atoms in the neon gas were of higher mass than the rest. Though not understood at the time by Thomson, this was the first discovery of isotopes of stable atoms. Thomson's device was a crude version of the instrument we now term a mass spectrometer.
Isotopes
edit
Neon has three stable isotopes: 20Ne (90.48%), 21Ne (0.27%) and 22Ne (9.25%).[24]
21Ne and 22Ne are partly primordial and partly nucleogenic (i.e. made by nuclear reactions of other nuclides with neutrons or other particles in the environment) and their variations in natural abundance are well understood. In contrast, 20Ne (the chief primordial isotope made in stellar nucleosynthesis) is not known to be nucleogenic or radiogenic, except from the decay of oxygen-20, which is produced in very rare cases of cluster decay by thorium-228. The causes of the variation of 20Ne in the Earth have thus been hotly debated.[25][26]
The principal nuclear reactions generating nucleogenic neon isotopes start from 24Mg and 25Mg, which produce 21Ne and 22Ne respectively, after neutron capture and immediate emission of an alpha particle. The neutrons that produce the reactions are mostly produced by secondary spallation reactions from alpha particles, in turn derived from uranium-series decay chains. The net result yields a trend towards lower 20Ne/22Ne and higher 21Ne/22Ne ratios observed in uranium-rich rocks such as granites.[26]
In addition, isotopic analysis of exposed terrestrial rocks has demonstrated the cosmogenic (cosmic ray) production of 21Ne. This isotope is generated by spallation reactions on magnesium, sodium, silicon, and aluminium. By analyzing all three isotopes, the cosmogenic component can be resolved from magmatic neon and nucleogenic neon. This suggests that neon will be a useful tool in determining cosmic exposure ages of surface rocks and meteorites.[27]
Neon in solar wind contains a higher proportion of 20Ne than nucleogenic and cosmogenic sources.[26] Neon content observed in samples of volcanic gases and diamonds is also enriched in 20Ne, suggesting a primordial, possibly solar origin.[28]
Characteristics
editNeon is the second-lightest noble gas, after helium. Like other noble gases, neon is colorless and odorless. It glows reddish-orange in a vacuum discharge tube. It has over 40 times the refrigerating capacity (per unit volume) of liquid helium and three times that of liquid hydrogen.[3] In most applications it is a less expensive refrigerant than helium.[29][30] Despite helium surpassing neon in terms of ionization energy, it is theorized to be the least reactive of all the elements, even less so than the former.[31]

Neon plasma has the most intense light discharge at normal voltages and currents of all the noble gases. The average color of this light to the human eye is red-orange due to many lines in this range; it also contains a strong green line, which is hidden, unless the visual components are dispersed by a spectroscope.[32]
Occurrence
editStable isotopes of neon are produced in stars. Neon's most abundant isotope 20Ne (90.48%) is created by the nuclear fusion of carbon and carbon in the carbon-burning process of stellar nucleosynthesis. This requires temperatures above 500 megakelvins, which occur in the cores of stars of more than 8 solar masses.[33][34]
Neon is abundant on a universal scale; it is the fifth most abundant chemical element in the universe by mass, after hydrogen, helium, oxygen, and carbon (see chemical element).[35] Its relative rarity on Earth, like that of helium, is due to its relative lightness, high vapor pressure at very low temperatures, and chemical inertness, all properties which tend to keep it from being trapped in the condensing gas and dust clouds that formed the smaller and warmer solid planets like Earth. Neon is monatomic, making it lighter than the molecules of diatomic nitrogen and oxygen which form the bulk of Earth's atmosphere; a balloon filled with neon will rise in air, albeit more slowly than a helium balloon.[36]
Neon's abundance in the universe is about 1 part in 750 by mass; in the Sun and presumably in its proto-solar system nebula, about 1 part in 600.[citation needed] The Galileo spacecraft atmospheric entry probe found that in the upper atmosphere of Jupiter, the abundance of neon is reduced (depleted) by about a factor of 10, to a level of 1 part in 6,000 by mass. This may indicate that the ice-planetesimals that brought neon into Jupiter from the outer solar system formed in a region that was too warm to retain the neon atmospheric component (abundances of heavier inert gases on Jupiter are several times that found in the Sun),[37] or that neon is selectively sequestered in the planet's interior.[38]
Neon comprises 1 part in 55,000 in the Earth's atmosphere, or 18.2 ppm by volume (this is about the same as the molecule or mole fraction), or 1 part in 79,000 of air by mass. It comprises a smaller fraction in the crust. It is industrially produced by cryogenic fractional distillation of liquefied air.[3]
On 17 August 2015, based on studies with the Lunar Atmosphere and Dust Environment Explorer (LADEE) spacecraft, NASA scientists reported the detection of neon in the exosphere of the moon.[39]
Chemistry
edit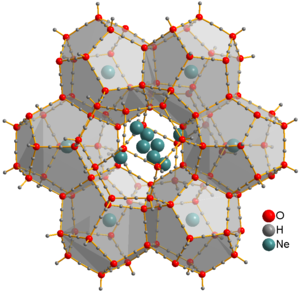
Neon is the first p-block noble gas and the first element with a true octet of electrons. It is inert: as is the case with its lighter analog, helium, no strongly bound neutral molecules containing neon have been identified. The ions [NeAr]+, [NeH]+, and [HeNe]+ have been observed from optical and mass spectrometric studies.[3] Solid neon clathrate hydrate was produced from water ice and neon gas at pressures 350–480 MPa and temperatures about −30 °C.[41] Ne atoms are not bonded to water and can freely move through this material. They can be extracted by placing the clathrate into a vacuum chamber for several days, yielding ice XVI, the least dense crystalline form of water.[40]
The familiar Pauling electronegativity scale relies upon chemical bond energies, but such values have obviously not been measured for inert helium and neon. The Allen electronegativity scale, which relies only upon (measurable) atomic energies, identifies neon as the most electronegative element, closely followed by fluorine and helium.[42]
The triple point temperature of neon (24.5561 K) is a defining fixed point in the International Temperature Scale of 1990.[43]
Production
editNeon is produced from air in cryogenic air-separation plants. A gas-phase mixture mainly of nitrogen, neon, helium, and hydrogen[44] is withdrawn from the main condenser at the top of the high-pressure air-separation column and fed to the bottom of a side column for rectification of the neon.[45] It can then be further purified from helium by bringing it into contact with activated charcoal. Hydrogen is purified from the neon by adding oxygen so water is formed and is condensed.[44] 1 pound of pure neon can be produced from the processing of 88,000 pounds of the gas-phase mixture.[44]
Before the 2022 escalation of the war with Russia about 70% of the global neon supply was produced in Ukraine[46] as a by-product of steel production in Russia.[47] As of 2020[update], the company Iceblick, with plants in Odesa and Moscow, supplies 65% of the world's production of neon, as well as 15% of the krypton and xenon.[48][49]
2022 shortage
editGlobal neon prices jumped by about 600% after the 2014 Russian annexation of Crimea,[50] spurring some chip manufacturers to start shifting away from Russian and Ukrainian suppliers[51] and toward suppliers in China.[49] The 2022 Russian invasion of Ukraine also shut down two companies in Ukraine that produced about half of the global supply: Cryoin Engineering (Ukrainian: Кріоін Інжинірінг) and Inhaz (Ukrainian: ІНГАЗ), located in Odesa and Mariupol, respectively.[50] The closure was predicted to exacerbate the COVID-19 chip shortage,[49][48] which may further shift neon production to China.[51]
Applications
editLighting and signage
edit
Two quite different kinds of neon lighting are in common use. Neon glow lamps are generally tiny, with most operating between 100 and 250 volts.[52] They have been widely used as power-on indicators and in circuit-testing equipment, but light-emitting diodes (LEDs) now dominate in those applications. These simple neon devices were the forerunners of plasma displays and plasma television screens.[53][54] Neon signs typically operate at much higher voltages (2–15 kilovolts), and the luminous tubes are commonly meters long.[55] The glass tubing is often formed into shapes and letters for signage, as well as architectural and artistic applications.
In neon signs, neon produces an unmistakable bright reddish-orange light when electric current passes through it under low pressure.[56] Although tube lights with other colors are often called "neon", they use different noble gases or varied colors of fluorescent lighting, for example, argon produces a lavender or blue hue.[57] As of 2012, there are over one hundred colors available.[58]
Other
editNeon is used in vacuum tubes, high-voltage indicators, lightning arresters, wavemeter tubes, television tubes, and helium–neon lasers. Gas mixtures that include high-purity neon are used in lasers for photolithography in semiconductor device fabrication.[50]
Liquefied neon is commercially used as a cryogenic refrigerant in applications not requiring the lower temperature range attainable with the more extreme liquid helium refrigeration.
References
edit- ^ "Standard Atomic Weights: Neon". CIAAW. 1985.
- ^ Prohaska, Thomas; Irrgeher, Johanna; Benefield, Jacqueline; Böhlke, John K.; Chesson, Lesley A.; Coplen, Tyler B.; Ding, Tiping; Dunn, Philip J. H.; Gröning, Manfred; Holden, Norman E.; Meijer, Harro A. J. (4 May 2022). "Standard atomic weights of the elements 2021 (IUPAC Technical Report)". Pure and Applied Chemistry. doi:10.1515/pac-2019-0603. ISSN 1365-3075.
- ^ a b c d Hammond, C. R. (2000). The Elements, in Handbook of Chemistry and Physics 81st edition (PDF). CRC press. p. 19. ISBN 0849304814.
- ^ Preston-Thomas, H. (1990). "The International Temperature Scale of 1990 (ITS-90)". Metrologia. 27 (1): 3–10. Bibcode:1990Metro..27....3P. doi:10.1088/0026-1394/27/1/002.
- ^ a b Haynes, William M., ed. (2011). CRC Handbook of Chemistry and Physics (92nd ed.). Boca Raton, FL: CRC Press. p. 4.122. ISBN 1-4398-5511-0.
- ^ Shuen-Chen Hwang, Robert D. Lein, Daniel A. Morgan (2005). "Noble Gases". in Kirk Othmer Encyclopedia of Chemical Technology, pages 343–383. Wiley. doi:10.1002/0471238961.0701190508230114.a01.pub2
- ^ Arblaster, John W. (2018). Selected Values of the Crystallographic Properties of Elements. Materials Park, Ohio: ASM International. ISBN 978-1-62708-155-9.
- ^ Magnetic susceptibility of the elements and inorganic compounds, in Lide, D. R., ed. (2005). CRC Handbook of Chemistry and Physics (86th ed.). Boca Raton (FL): CRC Press. ISBN 0-8493-0486-5.
- ^ Weast, Robert (1984). CRC, Handbook of Chemistry and Physics. Boca Raton, Florida: Chemical Rubber Company Publishing. pp. E110. ISBN 0-8493-0464-4.
- ^ Ramsay, William; Travers, Morris W. (1898). "On the Companions of Argon". Proceedings of the Royal Society of London. 63 (1): 437–440. doi:10.1098/rspl.1898.0057.
- ^ "Neon: History". Softciências. Retrieved 27 February 2007.
- ^ Kondev, F. G.; Wang, M.; Huang, W. J.; Naimi, S.; Audi, G. (2021). "The NUBASE2020 evaluation of nuclear properties" (PDF). Chinese Physics C. 45 (3): 030001. doi:10.1088/1674-1137/abddae.
- ^ Group 18 refers to the modern numbering of the periodic table. Older numberings described the rare gases as Group 0 or Group VIIIA (sometimes shortened to 8). See also Group (periodic table).
- ^ Coyle, Harold P. (2001). Project STAR: The Universe in Your Hands. Kendall Hunt. p. 464. ISBN 978-0-7872-6763-6.
- ^ Kohmoto, Kohtaro (1999). "Phosphors for lamps". In Shionoya, Shigeo; Yen, William M. (eds.). Phosphor Handbook. CRC Press. p. 940. ISBN 978-0-8493-7560-6.
- ^ Ramsay, William; Travers, Morris W. (1898). "On the Companions of Argon". Proceedings of the Royal Society of London. 63 (1): 437–440. doi:10.1098/rspl.1898.0057. S2CID 98818445.
- ^ "Neon: History". Softciências. Archived from the original on 14 March 2007. Retrieved 27 February 2007.
- ^ Weeks, Mary Elvira (2003). Discovery of the Elements: Third Edition (reprint). Kessinger Publishing. p. 287. ISBN 978-0-7661-3872-8. Archived from the original on 22 March 2015.
- ^ a b Ramsay, Sir William (12 December 1904). "Nobel Lecture – The Rare Gases of the Atmosphere". nobelprize.org. Nobel Media AB. Archived from the original on 13 November 2015. Retrieved 15 November 2015.
- ^ Ramsay, William; Travers, Morris W. (1898). "On the Companions of Argon". Proceedings of the Royal Society of London. 63 (1): 437–440. doi:10.1098/rspl.1898.0057. ISSN 0370-1662. S2CID 98818445.
- ^ Mangum, Aja (8 December 2007). "Neon: A Brief History". New York Magazine. Archived from the original on 15 April 2008. Retrieved 20 May 2008.
- ^ Golec, Michael J. (2010). "Logo/Local Intensities: Lacan, the Discourse of the Other, and the Solicitation to "Enjoy"". Design and Culture. 2 (2): 167–181. doi:10.2752/175470710X12696138525622. S2CID 144257608.
- ^ Wolfe, Tom (October 1968). "Electro-Graphic Architecture". Architecture Canada.
- ^ Kondev, F. G.; Wang, M.; Huang, W. J.; Naimi, S.; Audi, G. (2021). "The NUBASE2020 evaluation of nuclear properties" (PDF). Chinese Physics C. 45 (3): 030001. doi:10.1088/1674-1137/abddae.
- ^ Dickin, Alan P (2005). "Neon". Radiogenic isotope geology. Cambridge University Press. p. 303. ISBN 978-0-521-82316-6.
- ^ a b c Resources on Isotopes Periodic Table—Neon at the U.S. Geological Survey, by Eric Caldwell, posted January 2004, retrieved 10 February 2011
- ^ "Neon: Isotopes". Softciências. Archived from the original on 15 November 2012. Retrieved 27 February 2007.
- ^ Anderson, Don L. "Helium, Neon & Argon". Mantleplumes.org. Archived from the original on 28 May 2006. Retrieved 2 July 2006.
- ^ "NASSMC: News Bulletin". 30 December 2005. Archived from the original on 13 February 2007. Retrieved 5 March 2007.
- ^ Mukhopadhyay, Mamata (2012). Fundamentals of Cryogenic Engineering. PHI Learning Pvt. p. 195. ISBN 9788120330573. Archived from the original on 16 November 2017.
- ^ Lewars, Errol G. (2008). Modelling Marvels. Springer. pp. 70–71. Bibcode:2008moma.book.....L. ISBN 978-1-4020-6972-7.
- ^ "Plasma". Archived from the original on 7 March 2007. Retrieved 5 March 2007.
- ^ Clayton, Donald (2003). Handbook of Isotopes in the Cosmos: Hydrogen to Gallium. Cambridge University Press. pp. 106–107. ISBN 978-0521823814.
- ^ Ryan, Sean G.; Norton, Andrew J. (2010). Stellar Evolution and Nucleosynthesis. Cambridge University Press. p. 135. ISBN 978-0-521-13320-3.
- ^ Asplund, Martin; Grevesse, Nicolas; Sauval, A. Jacques; Scott, Pat (2009). "The Chemical Composition of the Sun". Annual Review of Astronomy and Astrophysics. 47 (1): 481–522. arXiv:0909.0948. Bibcode:2009ARA&A..47..481A. doi:10.1146/annurev.astro.46.060407.145222. S2CID 17921922.
- ^ Gallagher, R.; Ingram, P. (19 July 2001). Chemistry for Higher Tier. University Press. p. 282. ISBN 978-0-19-914817-2.
- ^ Morse, David (26 January 1996). "Galileo Probe Science Result". Galileo Project. Archived from the original on 24 February 2007. Retrieved 27 February 2007.
- ^ Wilson, Hugh F.; Militzer, Burkhard (March 2010), "Sequestration of Noble Gases in Giant Planet Interiors", Physical Review Letters, 104 (12): 121101, arXiv:1003.5940, Bibcode:2010PhRvL.104l1101W, doi:10.1103/PhysRevLett.104.121101, PMID 20366523, S2CID 9850759, 121101.
- ^ Steigerwald, William (17 August 2015). "NASA's LADEE Spacecraft Finds Neon in Lunar Atmosphere". NASA. Archived from the original on 19 August 2015. Retrieved 18 August 2015.
- ^ a b Falenty, Andrzej; Hansen, Thomas C.; Kuhs, Werner F. (2014). "Formation and properties of ice XVI obtained by emptying a type sII clathrate hydrate". Nature. 516 (7530): 231–3. Bibcode:2014Natur.516..231F. doi:10.1038/nature14014. PMID 25503235. S2CID 4464711.
- ^ Yu, X.; Zhu, J.; Du, S.; Xu, H.; Vogel, S. C.; Han, J.; Germann, T. C.; Zhang, J.; Jin, C.; Francisco, J. S.; Zhao, Y. (2014). "Crystal structure and encapsulation dynamics of ice II-structured neon hydrate". Proceedings of the National Academy of Sciences of the United States of America. 111 (29): 10456–61. Bibcode:2014PNAS..11110456Y. doi:10.1073/pnas.1410690111. PMC 4115495. PMID 25002464.
- ^ Allen, Leland C. (1989). "Electronegativity is the average one-electron energy of the valence-shell electrons in ground-state free atoms". Journal of the American Chemical Society. 111 (25): 9003–9014. doi:10.1021/ja00207a003.
- ^ "The Internet resource for the International Temperature Scale of 1990". Archived from the original on 15 August 2009. Retrieved 7 July 2009.
- ^ a b c "Neon | Definition, Uses, Melting Point, & Facts | Britannica". www.britannica.com. Retrieved 13 June 2023.
- ^ Shreve, R. Norris; Brink, Joseph (1977). Chemical Process Industries (4th ed.). McGraw-Hill. p. 113. ISBN 0-07-057145-7.
- ^ Mukul, Pranav (29 March 2022). "Explained: Why the Russia-Ukraine crisis may lead to a shortage in semiconductors". MSN. The Indian Express.
- ^ Alper, Alexandra (11 March 2022). "Exclusive: Russia's attack on Ukraine halts half of world's neon output for chips". Reuters. Retrieved 16 March 2022.
- ^ a b "Rare Gasses Supplier Known for Innovation". The European Times. 2020.
- ^ a b c Ukraine war flashes neon warning lights for chips, Reuters, 25 February 2022
- ^ a b c Times, Financial (4 March 2022). "Low on gas: Ukraine invasion chokes supply of neon needed for chipmaking". Ars Technica. Retrieved 13 March 2022.
- ^ a b "Chipmakers see limited impact for now, as Russia invades Ukraine". CNBC. 24 February 2022.
- ^ Baumann, Edward (1966). Applications of Neon Lamps and Gas Discharge Tubes. Carlton Press.
- ^ Myers, Robert L. (2002). Display interfaces: fundamentals and standards. John Wiley and Sons. pp. 69–71. ISBN 978-0-471-49946-6. Archived from the original on 29 June 2016.
Plasma displays are closely related to the simple neon lamp.
- ^ Weber, Larry F. (April 2006). "History of the plasma display panel". IEEE Transactions on Plasma Science. 34 (2): 268–278. Bibcode:2006ITPS...34..268W. doi:10.1109/TPS.2006.872440. S2CID 20290119. Paid access.
- ^ "ANSI Luminous Tube Footage Chart" (PDF). American National Standards Institute (ANSI). Archived (PDF) from the original on 6 February 2011. Retrieved 10 December 2010. Reproduction of a chart in the catalog of a lighting company in Toronto; the original ANSI specification is not given.
- ^ mlblevins (24 June 2009). "A Brief Summary of the Important Uses of Neon". Science Struck. Retrieved 10 August 2023.
- ^ Nuena, Julia (6 September 2019). "How Do Neon Signs Have Different Colors?". NeonSign.com. Retrieved 10 August 2023.
- ^ Thielen, Marcus (August 2005). "Happy Birthday Neon!". Signs of the Times. Archived from the original on 3 March 2012.
External links
edit- Neon at The Periodic Table of Videos (University of Nottingham)
- WebElements.com – Neon.
- It's Elemental – Neon
- USGS Periodic Table – Neon
- Atomic Spectrum of Neon
- Neon Museum, Las Vegas