In probability theory and statistics, a covariance matrix (also known as auto-covariance matrix, dispersion matrix, variance matrix, or variance–covariance matrix) is a square matrix giving the covariance between each pair of elements of a given random vector.
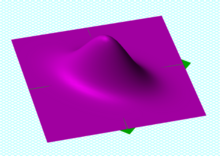
A bivariate Gaussian probability density function centered at (0, 0), with covariance matrix given by Sample points from a bivariate Gaussian distribution with a standard deviation of 3 in roughly the lower left–upper right direction and of 1 in the orthogonal direction. Because the x and y components co-vary, the variances of and do not fully describe the distribution. A covariance matrix is needed; the directions of the arrows correspond to the eigenvectors of this covariance matrix and their lengths to the square roots of the eigenvalues.
Intuitively, the covariance matrix generalizes the notion of variance to multiple dimensions. As an example, the variation in a collection of random points in two-dimensional space cannot be characterized fully by a single number, nor would the variances in the and directions contain all of the necessary information; a matrix would be necessary to fully characterize the two-dimensional variation.
The covariance matrix of a random vector is typically denoted by , or .
Definitionedit
Throughout this article, boldfaced unsubscripted and are used to refer to random vectors, and Roman subscripted and are used to refer to scalar random variables.
where the operator denotes the expected value (mean) of its argument.
Conflicting nomenclatures and notationsedit
Nomenclatures differ. Some statisticians, following the probabilist William Feller in his two-volume book An Introduction to Probability Theory and Its Applications,[2] call the matrix the variance of the random vector , because it is the natural generalization to higher dimensions of the 1-dimensional variance. Others call it the covariance matrix, because it is the matrix of covariances between the scalar components of the vector .
Both forms are quite standard, and there is no ambiguity between them. The matrix is also often called the variance-covariance matrix, since the diagonal terms are in fact variances.
An entity closely related to the covariance matrix is the matrix of Pearson product-moment correlation coefficients between each of the random variables in the random vector , which can be written as
where is the matrix of the diagonal elements of (i.e., a diagonal matrix of the variances of for ).
Equivalently, the correlation matrix can be seen as the covariance matrix of the standardized random variables for .
Each element on the principal diagonal of a correlation matrix is the correlation of a random variable with itself, which always equals 1. Each off-diagonal element is between −1 and +1 inclusive.
Inverse of the covariance matrixedit
The inverse of this matrix, , if it exists, is the inverse covariance matrix (or inverse concentration matrix), also known as the precision matrix (or concentration matrix).[3]
Just as the covariance matrix can be written as the rescaling of a correlation matrix by the marginal variances:
So, using the idea of partial correlation, and partial variance, the inverse covariance matrix can be expressed analogously:
This duality motivates a number of other dualities between marginalizing and conditioning for Gaussian random variables.
Basic propertiesedit
For and , where is a -dimensional random variable, the following basic properties apply:[4]
The matrix is known as the matrix of regression coefficients, while in linear algebra is the Schur complement of in .
The matrix of regression coefficients may often be given in transpose form, , suitable for post-multiplying a row vector of explanatory variables rather than pre-multiplying a column vector . In this form they correspond to the coefficients obtained by inverting the matrix of the normal equations of ordinary least squares (OLS).
Partial covariance matrixedit
A covariance matrix with all non-zero elements tells us that all the individual random variables are interrelated. This means that the variables are not only directly correlated, but also correlated via other variables indirectly. Often such indirect, common-mode correlations are trivial and uninteresting. They can be suppressed by calculating the partial covariance matrix, that is the part of covariance matrix that shows only the interesting part of correlations.
If two vectors of random variables and are correlated via another vector , the latter correlations are suppressed in a matrix[6]
The partial covariance matrix is effectively the simple covariance matrix as if the uninteresting random variables were held constant.
Covariance matrix as a parameter of a distributionedit
Applied to one vector, the covariance matrix maps a linear combination c of the random variables X onto a vector of covariances with those variables: . Treated as a bilinear form, it yields the covariance between the two linear combinations: . The variance of a linear combination is then , its covariance with itself.
Similarly, the (pseudo-)inverse covariance matrix provides an inner product , which induces the Mahalanobis distance, a measure of the "unlikelihood" of c.[citation needed]
Which matrices are covariance matrices?edit
From the identity just above, let be a real-valued vector, then
which must always be nonnegative, since it is the variance of a real-valued random variable, so a covariance matrix is always a positive-semidefinite matrix.
The above argument can be expanded as follows:
where the last inequality follows from the observation that is a scalar.
Conversely, every symmetric positive semi-definite matrix is a covariance matrix. To see this, suppose is a symmetric positive-semidefinite matrix. From the finite-dimensional case of the spectral theorem, it follows that has a nonnegative symmetric square root, which can be denoted by M1/2. Let be any column vector-valued random variable whose covariance matrix is the identity matrix. Then
where the complex conjugate of a complex number is denoted ; thus the variance of a complex random variable is a real number.
If is a column vector of complex-valued random variables, then the conjugate transpose is formed by both transposing and conjugating. In the following expression, the product of a vector with its conjugate transpose results in a square matrix called the covariance matrix, as its expectation:[7]: 293
The matrix so obtained will be Hermitianpositive-semidefinite,[8] with real numbers in the main diagonal and complex numbers off-diagonal.
The diagonal elements of the covariance matrix are real.[1]: 179
Pseudo-covariance matrixedit
For complex random vectors, another kind of second central moment, the pseudo-covariance matrix (also called relation matrix) is defined as follows:
In contrast to the covariance matrix defined above, Hermitian transposition gets replaced by transposition in the definition.
Its diagonal elements may be complex valued; it is a complex symmetric matrix.
Estimationedit
If and are centered data matrices of dimension and respectively, i.e. with n columns of observations of p and q rows of variables, from which the row means have been subtracted, then, if the row means were estimated from the data, sample covariance matrices and can be defined to be
or, if the row means were known a priori,
These empirical sample covariance matrices are the most straightforward and most often used estimators for the covariance matrices, but other estimators also exist, including regularised or shrinkage estimators, which may have better properties.
Applicationsedit
The covariance matrix is a useful tool in many different areas. From it a transformation matrix can be derived, called a whitening transformation, that allows one to completely decorrelate the data[citation needed] or, from a different point of view, to find an optimal basis for representing the data in a compact way[citation needed] (see Rayleigh quotient for a formal proof and additional properties of covariance matrices).
This is called principal component analysis (PCA) and the Karhunen–Loève transform (KL-transform).
The evolution strategy, a particular family of Randomized Search Heuristics, fundamentally relies on a covariance matrix in its mechanism. The characteristic mutation operator draws the update step from a multivariate normal distribution using an evolving covariance matrix. There is a formal proof that the evolution strategy's covariance matrix adapts to the inverse of the Hessian matrix of the search landscape, up to a scalar factor and small random fluctuations (proven for a single-parent strategy and a static model, as the population size increases, relying on the quadratic approximation).[9]
Intuitively, this result is supported by the rationale that the optimal covariance distribution can offer mutation steps whose equidensity probability contours match the level sets of the landscape, and so they maximize the progress rate.
Covariance mappingedit
In covariance mapping the values of the or matrix are plotted as a 2-dimensional map. When vectors and are discrete random functions, the map shows statistical relations between different regions of the random functions. Statistically independent regions of the functions show up on the map as zero-level flatland, while positive or negative correlations show up, respectively, as hills or valleys.
In practice the column vectors , and are acquired experimentally as rows of samples, e.g.
where is the i-th discrete value in sample j of the random function . The expected values needed in the covariance formula are estimated using the sample mean, e.g.
and the covariance matrix is estimated by the sample covariance matrix
where the angular brackets denote sample averaging as before except that the Bessel's correction should be made to avoid bias. Using this estimation the partial covariance matrix can be calculated as
where the backslash denotes the left matrix division operator, which bypasses the requirement to invert a matrix and is available in some computational packages such as Matlab.[10]Figure 1: Construction of a partial covariance map of N2 molecules undergoing Coulomb explosion induced by a free-electron laser.[11] Panels a and b map the two terms of the covariance matrix, which is shown in panel c. Panel d maps common-mode correlations via intensity fluctuations of the laser. Panel e maps the partial covariance matrix that is corrected for the intensity fluctuations. Panel f shows that 10% overcorrection improves the map and makes ion-ion correlations clearly visible. Owing to momentum conservation these correlations appear as lines approximately perpendicular to the autocorrelation line (and to the periodic modulations which are caused by detector ringing).
Fig. 1 illustrates how a partial covariance map is constructed on an example of an experiment performed at the FLASHfree-electron laser in Hamburg.[11] The random function is the time-of-flight spectrum of ions from a Coulomb explosion of nitrogen molecules multiply ionised by a laser pulse. Since only a few hundreds of molecules are ionised at each laser pulse, the single-shot spectra are highly fluctuating. However, collecting typically such spectra, , and averaging them over produces a smooth spectrum , which is shown in red at the bottom of Fig. 1. The average spectrum reveals several nitrogen ions in a form of peaks broadened by their kinetic energy, but to find the correlations between the ionisation stages and the ion momenta requires calculating a covariance map.
In the example of Fig. 1 spectra and are the same, except that the range of the time-of-flight differs. Panel a shows , panel b shows and panel c shows their difference, which is (note a change in the colour scale). Unfortunately, this map is overwhelmed by uninteresting, common-mode correlations induced by laser intensity fluctuating from shot to shot. To suppress such correlations the laser intensity is recorded at every shot, put into and is calculated as panels d and e show. The suppression of the uninteresting correlations is, however, imperfect because there are other sources of common-mode fluctuations than the laser intensity and in principle all these sources should be monitored in vector . Yet in practice it is often sufficient to overcompensate the partial covariance correction as panel f shows, where interesting correlations of ion momenta are now clearly visible as straight lines centred on ionisation stages of atomic nitrogen.
Two-dimensional infrared spectroscopyedit
Two-dimensional infrared spectroscopy employs correlation analysis to obtain 2D spectra of the condensed phase. There are two versions of this analysis: synchronous and asynchronous. Mathematically, the former is expressed in terms of the sample covariance matrix and the technique is equivalent to covariance mapping.[12]
^ abcPark, Kun Il (2018). Fundamentals of Probability and Stochastic Processes with Applications to Communications. Springer. ISBN 978-3-319-68074-3.
^William Feller (1971). An introduction to probability theory and its applications. Wiley. ISBN 978-0-471-25709-7. Retrieved 10 August 2012.
^Wasserman, Larry (2004). All of Statistics: A Concise Course in Statistical Inference. Springer. ISBN 0-387-40272-1.
^Taboga, Marco (2010). "Lectures on probability theory and mathematical statistics".
^Eaton, Morris L. (1983). Multivariate Statistics: a Vector Space Approach. John Wiley and Sons. pp. 116–117. ISBN 0-471-02776-6.
^ abW J Krzanowski "Principles of Multivariate Analysis" (Oxford University Press, New York, 1988), Chap. 14.4; K V Mardia, J T Kent and J M Bibby "Multivariate Analysis (Academic Press, London, 1997), Chap. 6.5.3; T W Anderson "An Introduction to Multivariate Statistical Analysis" (Wiley, New York, 2003), 3rd ed., Chaps. 2.5.1 and 4.3.1.
^Lapidoth, Amos (2009). A Foundation in Digital Communication. Cambridge University Press. ISBN 978-0-521-19395-5.
^Shir, O.M.; A. Yehudayoff (2020). "On the covariance-Hessian relation in evolution strategies". Theoretical Computer Science. 801. Elsevier: 157–174. arXiv:1806.03674. doi:10.1016/j.tcs.2019.09.002.
^L J Frasinski "Covariance mapping techniques" J. Phys. B: At. Mol. Opt. Phys.49 152004 (2016), open access
^ abO Kornilov, M Eckstein, M Rosenblatt, C P Schulz, K Motomura, A Rouzée, J Klei, L Foucar, M Siano, A Lübcke, F. Schapper, P Johnsson, D M P Holland, T Schlatholter, T Marchenko, S Düsterer, K Ueda, M J J Vrakking and L J Frasinski "Coulomb explosion of diatomic molecules in intense XUV fields mapped by partial covariance" J. Phys. B: At. Mol. Opt. Phys.46 164028 (2013), open access
^I Noda "Generalized two-dimensional correlation method applicable to infrared, Raman, and other types of spectroscopy" Appl. Spectrosc.47 1329–36 (1993)

















![{\displaystyle \operatorname {K} _{X_{i}X_{j}}=\operatorname {cov} [X_{i},X_{j}]=\operatorname {E} [(X_{i}-\operatorname {E} [X_{i}])(X_{j}-\operatorname {E} [X_{j}])]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/83bec85f5e2cab5d3406677dd806e554a442331f)

![{\displaystyle \operatorname {var} (\mathbf {X} )=\operatorname {cov} (\mathbf {X} ,\mathbf {X} )=\operatorname {E} \left[(\mathbf {X} -\operatorname {E} [\mathbf {X} ])(\mathbf {X} -\operatorname {E} [\mathbf {X} ])^{\mathsf {T}}\right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b82e5154b73760426abe591f9bbc2329d3e0ed95)
![{\displaystyle \operatorname {cov} (\mathbf {X} ,\mathbf {Y} )=\operatorname {K} _{\mathbf {X} \mathbf {Y} }=\operatorname {E} \left[(\mathbf {X} -\operatorname {E} [\mathbf {X} ])(\mathbf {Y} -\operatorname {E} [\mathbf {Y} ])^{\mathsf {T}}\right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/28570bb5cfd00f8ad9bf4c1efa23448f4562e016)

![{\displaystyle \operatorname {K} _{\mathbf {X} \mathbf {X} }=\operatorname {E} [(\mathbf {X} -\operatorname {E} [\mathbf {X} ])(\mathbf {X} -\operatorname {E} [\mathbf {X} ])^{\mathsf {T}}]=\operatorname {R} _{\mathbf {X} \mathbf {X} }-\operatorname {E} [\mathbf {X} ]\operatorname {E} [\mathbf {X} ]^{\mathsf {T}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/842025962cba1c4ae9f6fc439593a2a2d0fa0f43)
![{\displaystyle \operatorname {R} _{\mathbf {X} \mathbf {X} }=\operatorname {E} [\mathbf {X} \mathbf {X} ^{\mathsf {T}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/14f4338a3b04aadc754ede1a6f2b38b190584022)




![{\displaystyle \operatorname {corr} (\mathbf {X} )={\begin{bmatrix}1&{\frac {\operatorname {E} [(X_{1}-\mu _{1})(X_{2}-\mu _{2})]}{\sigma (X_{1})\sigma (X_{2})}}&\cdots &{\frac {\operatorname {E} [(X_{1}-\mu _{1})(X_{n}-\mu _{n})]}{\sigma (X_{1})\sigma (X_{n})}}\\\\{\frac {\operatorname {E} [(X_{2}-\mu _{2})(X_{1}-\mu _{1})]}{\sigma (X_{2})\sigma (X_{1})}}&1&\cdots &{\frac {\operatorname {E} [(X_{2}-\mu _{2})(X_{n}-\mu _{n})]}{\sigma (X_{2})\sigma (X_{n})}}\\\\\vdots &\vdots &\ddots &\vdots \\\\{\frac {\operatorname {E} [(X_{n}-\mu _{n})(X_{1}-\mu _{1})]}{\sigma (X_{n})\sigma (X_{1})}}&{\frac {\operatorname {E} [(X_{n}-\mu _{n})(X_{2}-\mu _{2})]}{\sigma (X_{n})\sigma (X_{2})}}&\cdots &1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/df091a047aa8a9d829b25f68a5bbe6d56938b146)



![{\displaystyle \operatorname {K} _{\mathbf {X} \mathbf {X} }=\operatorname {var} (\mathbf {X} )=\operatorname {E} \left[\left(\mathbf {X} -\operatorname {E} [\mathbf {X} ]\right)\left(\mathbf {X} -\operatorname {E} [\mathbf {X} ]\right)^{\mathsf {T}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a9b6c515aa8e41237f7cc932b7f19822809c81ca)
![{\displaystyle {\boldsymbol {\mu }}_{\mathbf {X} }=\operatorname {E} [{\textbf {X}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/255b37ede48f45c71391d0db31a298fe7894b518)



































![{\displaystyle {\boldsymbol {\mu }}=\operatorname {E} [\mathbf {X} ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e1dd0939838410c3edd67238ec0cb1bbc37a1515)








![{\displaystyle {\begin{aligned}&w^{\mathsf {T}}\operatorname {E} \left[(\mathbf {X} -\operatorname {E} [\mathbf {X} ])(\mathbf {X} -\operatorname {E} [\mathbf {X} ])^{\mathsf {T}}\right]w=\operatorname {E} \left[w^{\mathsf {T}}(\mathbf {X} -\operatorname {E} [\mathbf {X} ])(\mathbf {X} -\operatorname {E} [\mathbf {X} ])^{\mathsf {T}}w\right]\\&=\operatorname {E} {\big [}{\big (}w^{\mathsf {T}}(\mathbf {X} -\operatorname {E} [\mathbf {X} ]){\big )}^{2}{\big ]}\geq 0,\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/740e6e46b6049e8e4f3ef1f87bf942fe1efc21eb)
![{\displaystyle w^{\mathsf {T}}(\mathbf {X} -\operatorname {E} [\mathbf {X} ])}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5b84bfa03d923b2ce9129a6aa1ae06defbb89173)





![{\displaystyle \operatorname {var} (Z)=\operatorname {E} \left[(Z-\mu _{Z}){\overline {(Z-\mu _{Z})}}\right],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b3a3d7abfa56fdb689ebd3c01388715ad4773d4a)




![{\displaystyle \operatorname {K} _{\mathbf {Z} \mathbf {Z} }=\operatorname {cov} [\mathbf {Z} ,\mathbf {Z} ]=\operatorname {E} \left[(\mathbf {Z} -{\boldsymbol {\mu }}_{\mathbf {Z} })(\mathbf {Z} -{\boldsymbol {\mu }}_{\mathbf {Z} })^{\mathsf {H}}\right],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/dd318464ced7eff095becbc3946d91b9b616d4d2)

![{\displaystyle \operatorname {J} _{\mathbf {Z} \mathbf {Z} }=\operatorname {cov} [\mathbf {Z} ,{\overline {\mathbf {Z} }}]=\operatorname {E} \left[(\mathbf {Z} -{\boldsymbol {\mu }}_{\mathbf {Z} })(\mathbf {Z} -{\boldsymbol {\mu }}_{\mathbf {Z} })^{\mathsf {T}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/64c36be608568ae163648f81267452490a2e9d2d)










![{\displaystyle \left[\mathbf {X} _{1},\mathbf {X} _{2},\dots ,\mathbf {X} _{n}\right]={\begin{bmatrix}X_{1}(t_{1})&X_{2}(t_{1})&\cdots &X_{n}(t_{1})\\\\X_{1}(t_{2})&X_{2}(t_{2})&\cdots &X_{n}(t_{2})\\\\\vdots &\vdots &\ddots &\vdots \\\\X_{1}(t_{m})&X_{2}(t_{m})&\cdots &X_{n}(t_{m})\end{bmatrix}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ef711d4f9c3662d3f2f2cc06c3772f10f9852834)















